Chapter 6 Application Debugging
MONT20 User Manual V1.6 43
6.2 Distance Control
Use encoder to measure door position.
Main Debugging Steps
1. Self-learn door width.
2. Set OD/CD curve.
3.
Confirm complete signal of door motor (F06.00) (F06.00 = 1, relay NC; F06.00 = 0, relay NO, NC is default)
according to elevator main control panel.
4. Set F00.03 = 1 (terminal control mode), and integrates into elevator system.
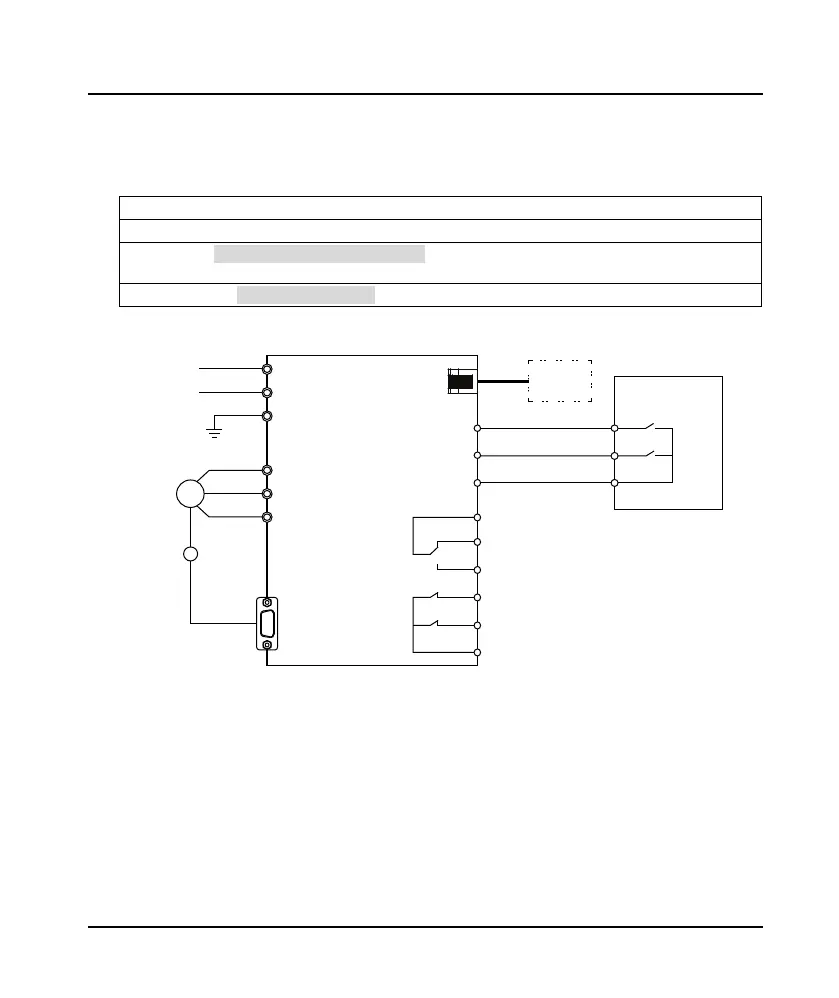
6.2.1 Wiring
Wiring requirements:
• To reduce the interference and attenuation of control signal, length of control cable should limit
within 50m. There should be more than 0.3m between the control cable and the motor cable.
• The control cable must be shielded cable.
• The communication cable must be shielded twisted pair, 20 - 30mm shielded distance, and the
shielded layer must be grounded.
• The encoder must use shielded cable, and one terminal of the shielded layer must be grounded
firmly.
DOA
DCA
CME
PA
PB
PC
U
V
W
L
N
PE
OD
CD
COM
M
PG
MONT20
Y1
Y2
CM1
MT70-CTB-B
Complete OD output
Complete CD output
Door position output
OD
CD
Optional
keypad
Single phase
220VAC
 Loading...
Loading...