Chapter 8 Parameter
POWER CON
PCON-CB/LC
180
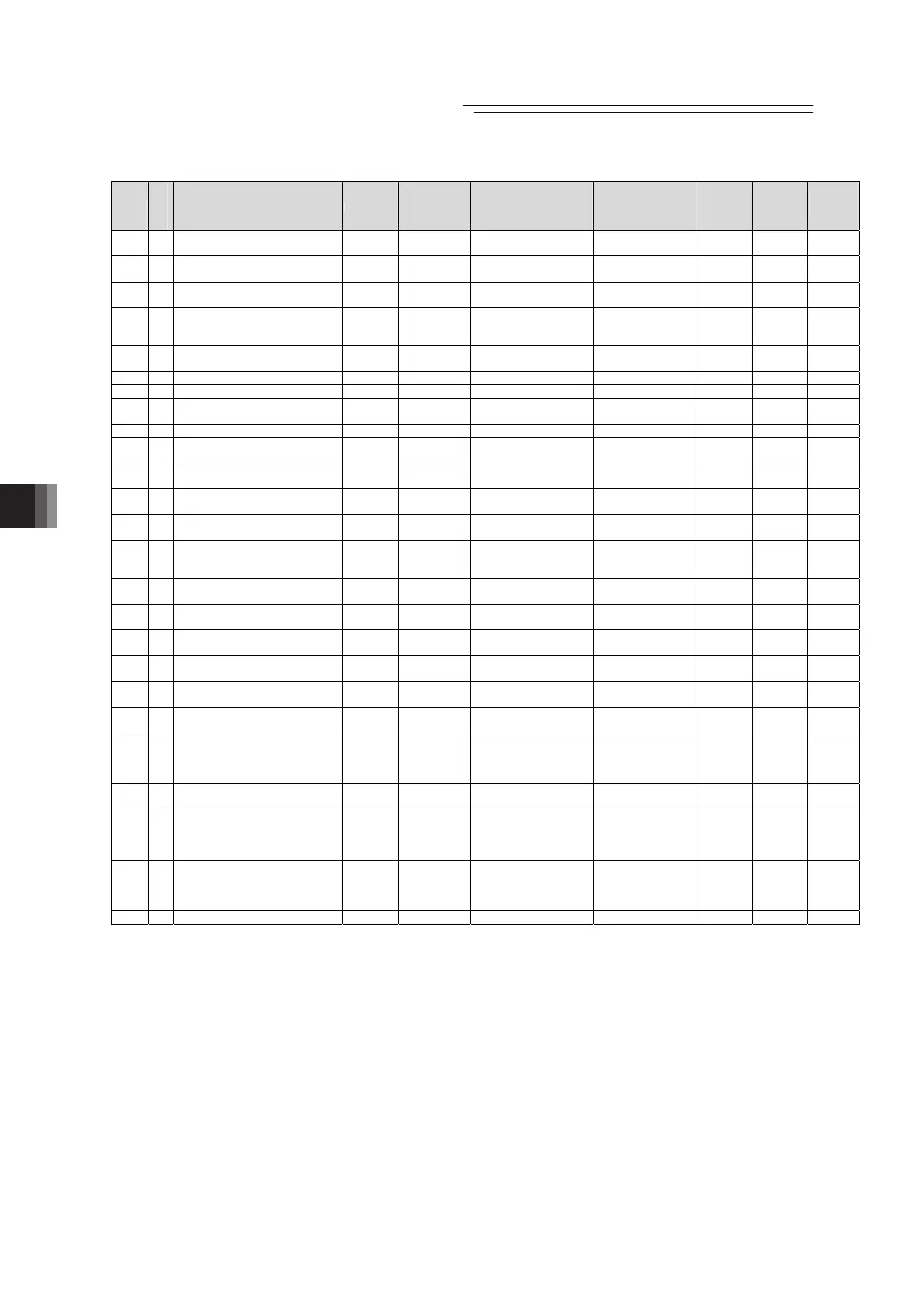
I/O Parameter List (Continued)
No.
Category
Name Symbol Unit
(Note1)
Input Range
Default factory
setting
for
Positioner
Mode
for Pulse
Train
Mode
Relevant
sections
60 B Deviation counter clear input DCLR –
0: Enabling
1: Disabling
0
{
3.3.5 [5]
61 B Torque limit command input TL –
0: Enabling
1: Disabling
0
{
3.3.5 [6]
62 B Pulse count direction CPR –
0: Forward motor rotation
1: Reverse motor rotation
In accordance with
actuator
(Note2)
{
3.3.5 [7]
63 B
Command pulse input mode
(Pulse train mode)
MOD – 0 to 2
1 (pulse-train and
moving direction
angle)
{
3.3.4 [2]
64 B
Command pulse input mode
polarity
CPMD –
0: Positive Logic
1: Negative Logic
0
{
3.3.4 [2]
65 B Electronic gear numerator CNUM – 1 to 4096 200
{
3.3.4 [1]
66 B Electronic gear denominator CDEN – 1 to 4096 15
{
3.3.4 [1]
67 B Compulsory stop input CSTP –
0: Enabling
1: Disabling
0
{
3.3.5 [8]
71 B Feed forward gain PLFG – 0 to 100 0
{ {
8.2 [56]
77 D Ball screw lead length LEAD
mm
(deg)
0.01 to 999.99
In accordance with
actuator
(Note2)
{ {
8.2 [57]
78 D Axis operation type ATYP –
0: Linear Axis
1: Rotary Axis
In accordance with
actuator
(Note2)
{
8.2 [58]
79 B Rotary axis mode selection ATYP –
0: Normal Mode
1: Index Mode
In accordance with
actuator
(Note2)
{
8.2 [59]
80 B Rotational axis shortcut selection ATYP –
0: Disabling
1: Enabling
In accordance with
actuator
(Note2)
{
8.2 [60]
83 B Absolute unit ETYP –
0: Incremental
1: Absolute Type
(Simple/Battery-less)
In accordance with
specification at order
accepted
{
8.2 [61]
84 A Fieldbus operation mode
(Note4)
FMOD – 0 to 4 Separate volume
{
Separate
volume
85 A Fieldbus node address
(Note4)
NADR – 0 to 65535 Separate volume
{
Separate
volume
86 A Fieldbus baud rate
(Note4)
FBRS – 0 to 4 Separate volume
{
Separate
volume
87 E Network type
(Note4)
NTYP – 0 to 9 Separate volume
{
Separate
volume
88 D Software limit margin SLMA mm 0 to 9999.99
In accordance with
actuator
(Note2)
{ {
8.2 [67]
90 C Fieldbus I/O format
(Note4)
FPIO – 0 to 3 Separate volume
{
Separate
volume
91 C
Current limit value at stopping due
to miss-pressing
FSTP –
0: Current limit value
during movement
1: Current limit value
during pressing
0
{
8.2 [69]
110 B Stop method at servo OFF FSTP –
0: Rapid stop
1: Deceleration to stop
0
{
8.2 [70]
111 B Calendar function FRTC –
0: Does not use the
calendar timer
1: Use the calendar
timer
1
{ {
8.2 [71]
112 B Monitoring mode FMNT –
0: Does not use
1: Monitor function 1
2: Monitor function 2
3: Monitor function 3
1
{ {
8.2 [72]
113 B Monitoring period FMNT msec 1 to 60000 1
{ {
8.2 [73]
Note 1 The unit (deg) is for rotary actuator and lever type gripper. It is displayed in mm in the teaching tools.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipment, the
parameters are set in accordance with the specification.
Note 4 These parameters are exclusively used for the fieldbus type.

 Loading...
Loading...







