204
Part 4 CommandsChapter 2 Explanation of Commands
Part 4 Commands
SCRV (Set sigmoid motion ratio)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1 Operand 2
Output
(Output, flag)
Optional Optional SCRV Ratio Prohibited CP
[Function] Set the ratio of sigmoid motion control of the actuator in the value specified in operand 1.
The ratio is set as an integer in a range from 0 to 50 (%).
When the ratio is not set or is set to 0%, the movement is set to the trapezoid motion.
S-shaped type is available to set in Operation 2. (Main application of Ver. 1.25 or later)
Refer to the instruction manual of the PC software and teaching pendant for the version of each
device that can have the setting for Operation 2.
Model Name
Setting in Operation 2
(S-shaped Type)
S-shaped Motion Class
S-shaped Motion Effective
Command Group
(See the table below)
XSEL-P/Q
Not set, 0 A1)
1B1)
2A2)
(Note 2)
3B2)
(Note 2)
XSEL-PCT/QCT
Not set, 0
B
(Note 1)
1)
11)
22)
(Note 2)
32)
(Note 2)
Note 1 The class of S-shaped motion is compulsorily B.
Note 2 S-shaped Motion is effective also at the speed change point (position joint point) during
PATH Command. If S-shaped Motion is activated, constant velocity or track could be
lost. Use the unit with S-shaped Motion ineffective in such processes as applying paint
or glue, in which the constant velocity and track are important.
Effective Command
Group
SCRV Effective Command
1) MOVP,MOVL,MVPI,MVLI,JBWF,JBWN,JFWF,JFWN
2) MOVP,MOVL,MVPI,MVLI,JBWF,JBWN,JFWF,JFWN,PATH,ARCH,PACH
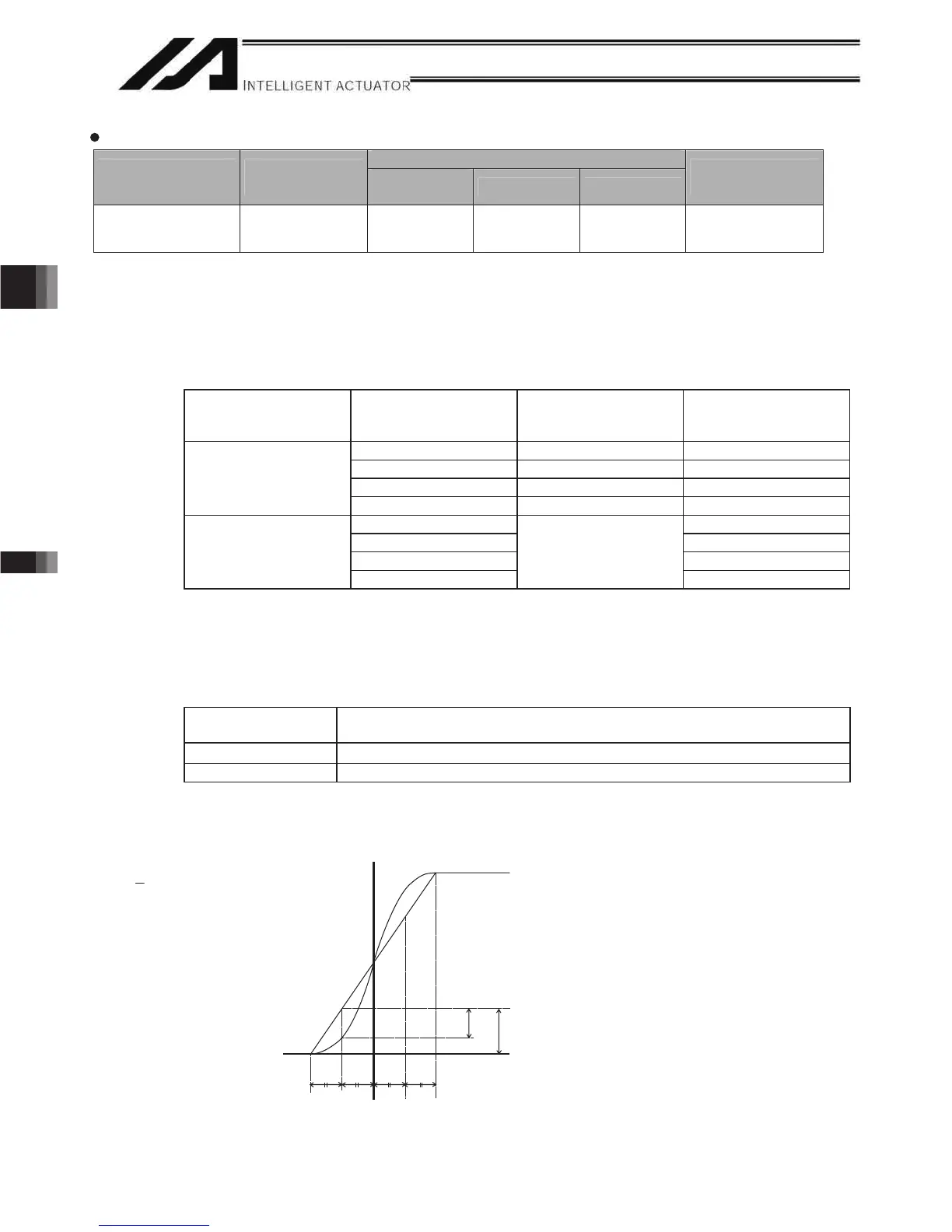
[Example ] SCRV 30 1 Set S-shaped motion ratio 30% and S-shaped motion class A.
Ɣ6VKDSHG0RWLRQ&ODVV$
a
b
X 100 (%)
a
b
Ɣ6VKDSHG0RWLRQ&ODVV%
In this class, operates with a speed pattern smoother than the control of S-shaped Motion Class A.
(Estrangement peak with Trapezoid Motion becomes small.)

 Loading...
Loading...








