344
Part 5 Multi-TaskingChapter 2 Example of Building a System
Part 5 Multi-Tasking
Chapter 2 Example of Building a System
How to build hardware and software is explained in details by using a screw-tightening robot as an example.
1. Equipment
Screw-tightening machine (for Z-axis)
Actuators (for axes 1 and 2) IAI’s 60-W servo motor with 300-mm stroke x 2
Controller IAI’s XSEL Controller
2. Operation
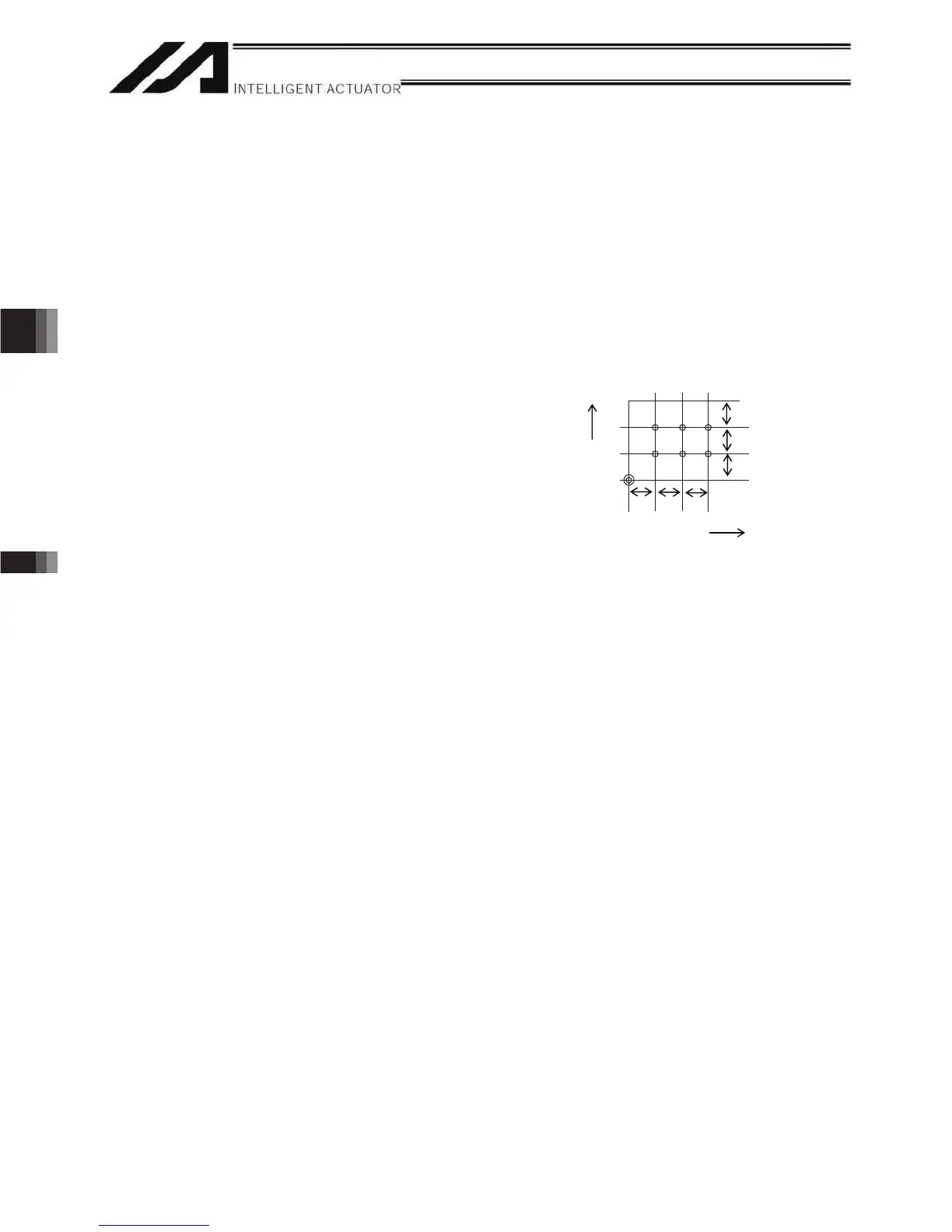
(1) Tighten six screws at 30-mm pitches on axes 1 and 2.
1. The actuators move to a screw-tightening position.
2. The Z-axis air cylinder of the screw-tightening machine
comes down.
3. The screw-tightening machine starts operating.
4. When the screw tightening is complete, the Z-axis air
cylinder rises.
5. The actuators move to the next position.
(2) The parts feeder operates in parallel with the above operation.
1. The parts feeder starts when screws are short.
2. The parts feeder stops when the screws are fully loaded.
Coordinates
Axis 2
Axis 1
30
30
30
30 30 30
456
123