ACD320 user manual Parameter Description
- 67-
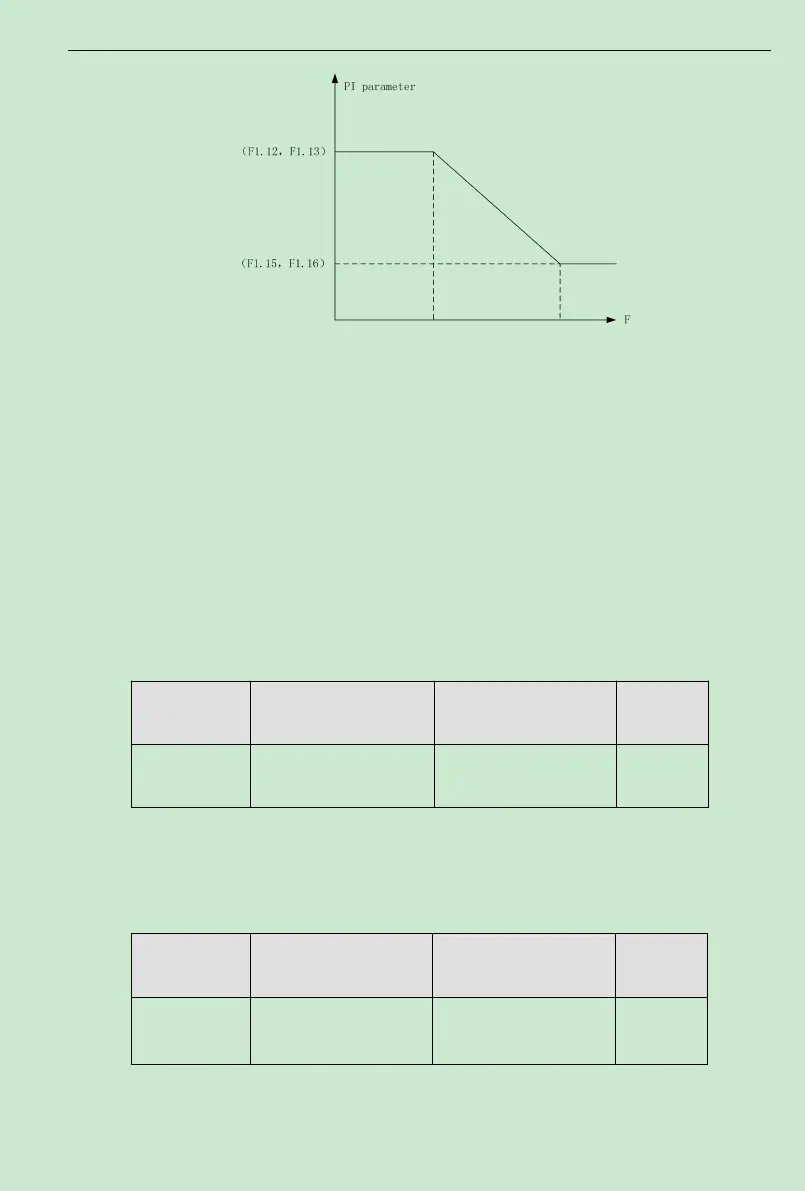
Fig. 6-5 PI ParameterDiagram
By means of setting the proportion factor and integration time of the speed regulator, the
speed dynamic response of vector control can be regulated. Increasing the proportional gain,and
reducing the integration time, can equally quicken the dynamic response of speed loop,but either
the proportional gain being too much or the integration time being too short can easily cause
system oscillation and too big overshoot. The proportional gain being too small also can lead to
system steady state oscillation and possibility of speed steady-state error occurring.
Speed loop PI parameters have an intimate relationwith the inertia ofmotor system, and
therefore based on the default PI parameter the user needs to make adjustment for different
loading character in order to meet different requirement.
Function Code Name Setting Range
Default
Value
F1.18
VC slip
compensating factor
50%~200% 100%
The slip compensating factor is used to adjust the slip frequency of vector control and
improve the system speed control accuracy. Properly regulating this parameter can effectively
restrain the speed steady-state error.
Function Code Name Setting Range
Default
Value
F1.19
Upper torque l imit
setting
0.0 ~ 200.0%(inverter
rated current)
150.0%
The setting 100.0%is corresponding to the rated output current.
The function code below (F1.20~F1.24) are valid to V/F control ( F0.00 =1 ), but invalid to