197
LC - Control Setting Parameters
This provides a low pass lter to the speed command. When the system inertia
has been entered, this setting will be calibrated according to the control mode.
In control modes where the speed prole is generated by the controller (serial,
analog), decreasing the frequency (increasing sample time) may help reduce
any unwanted affects from discontinuous inection points in the speed prole
generated by the controller.
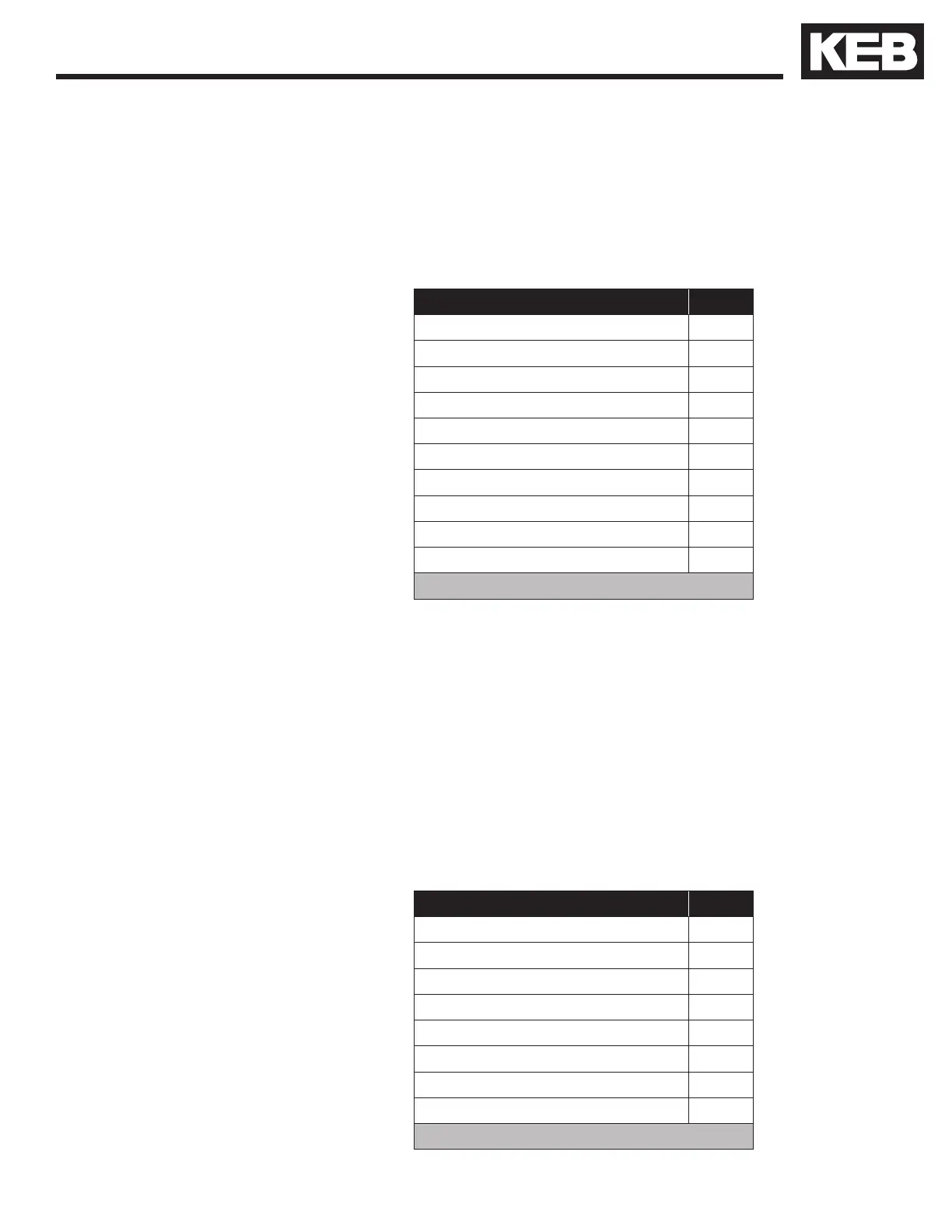
Settings: NUM
Off 0
4 ms (250 Hz) 1
8 ms (125 Hz) 2
16 ms (63 Hz) 3
32 ms (31 Hz) 4
64 ms (16Hz) 5
128 ms (8.0 Hz) 6
256 ms (4.0 Hz) 7
512 ms (2.0 Hz) 8
1024 ms (1.0 Hz) 9
Default = Off (0)
Determines the relative gain of the feed forward torque command. 100% =
unity command. A value of 90% is recommended. Higher values strengthen
the response, lower values weaken the response. When the system inertia
has been entered, this setting will be calibrated.
Provides a low pass lter on the torque command signal before it is fed into
the current control. Lower values can be used to eliminate audible harmonic
sounds which may be heard in the motor.
Settings: NUM
Off 0
0.5 ms (2000 Hz) 1
1 ms (1000 Hz) 2
2 ms (500 Hz) 3
4 ms (250 Hz) 4
8 ms (125Hz) 5
16 ms (63 Hz) 6
32 ms (31 Hz) 7
Default = Off (0)
LC42
Feed Forward Torque
Command Filter
LC43
Feed Forward Torque
Command Gain
LC44
Torque Command Filter

 Loading...
Loading...
















