309
Parameter Reference
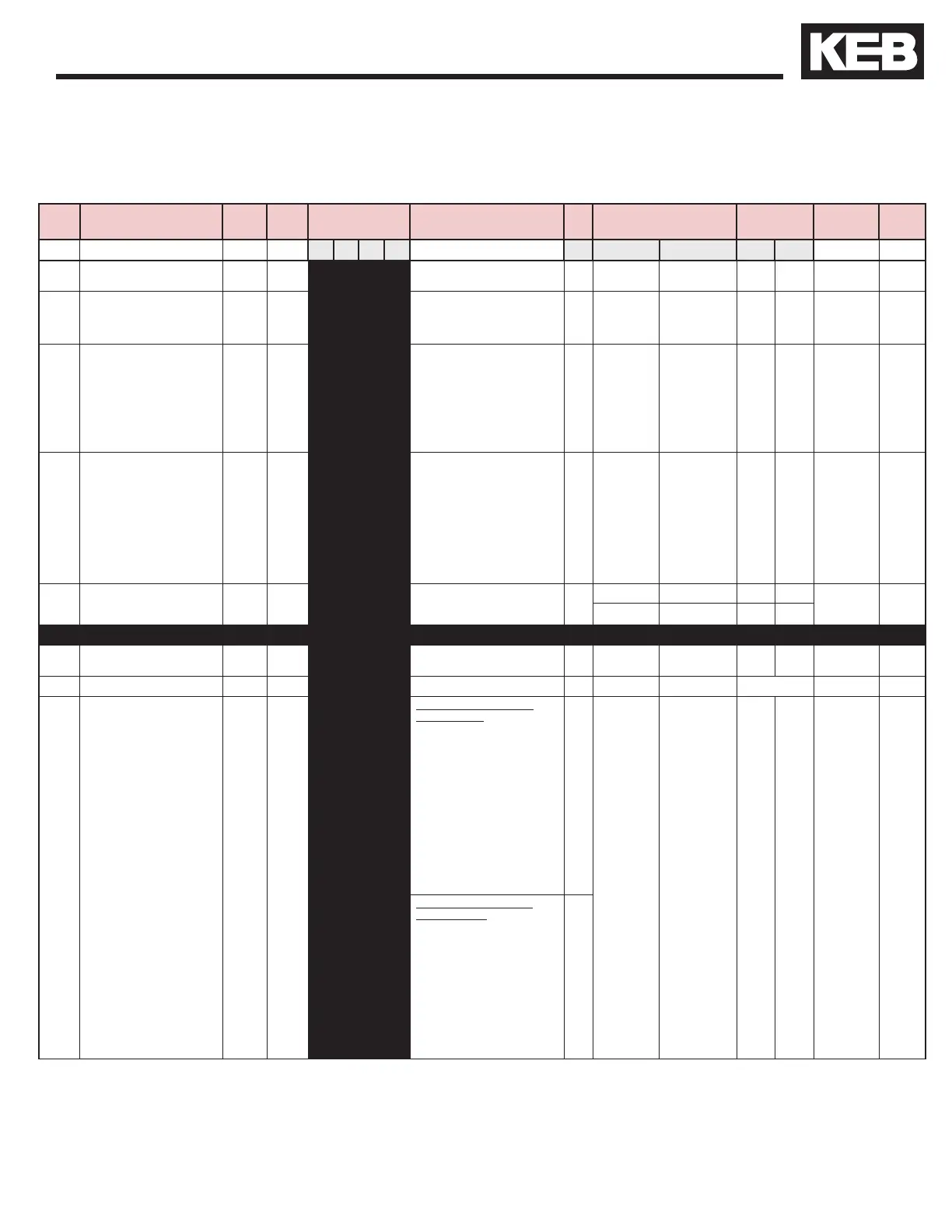
I = Induction Geared, IX = Induction Gearless, P = PM Geared, PX = PM Gearless
Para. Name
Hex v1.72 Motor/Gear Type
Setting
Options
NUM
Range Units Default
Pass
Level
I IX P PX Min. Max. Imp. Met.
US02 System Units
0282 -
RO RO RO RO
m/sec
ft/min
0
1
- - ft/min m/sec ft/min OEM
US03 Motor Type
0283 US10
Induction Geared
Induction Gearless
PM Synchronous Geared
PM Synchronous Gearless
0
1
2
3
- - - -
Induction
Geared
OEM
US04 Control Type
0284 LF2
Digital Speed Selection
Binary Speed Selection
Absolute Analog Speed
Bi-Polar Analog Speed
Serial Speed DIN66019, Serv.49
Serial Speed DIN66019, Serv.50
Serial Binary Speed DIN66019,
Serv.50
CiA417
0
1
2
3
4
5
6
7
- - - -
Binary
Speed
Selection
OEM
US05 Load Conguration
0285 US4
Not Congured
Conguration OK
Write Cong. to Drive
Read Cong. from Drive
Write Cong. to Flash
Read Cong. from Flash
-
-
Create OEM Defaults
Restore OEM Defaults
Restore KEB Defaults
0
1
2
3
4
5
6
7
8
9
10
- - - -
Not
Congured
OEM
US06 Contract Speed
0286 LF20
ft/min
m/s
0
1
0 2000 ft/min -
ft/min OEM
0 10.00 - m/s
LI01 Type of Input
0381 di0
PNP
NPN
0
1
- - - - PNP OEM
LI02 Digital Input Filter
0382 - - - 10 100 msec 100 OEM
LI03 Speed Input Decoding
0383 -
US04 Control Type = Binary
Speed Selection
B(Level - Correct - Inspection)
+ D(Level - Correct. - High -
Inspect.)
B(Inspection - Level - Correction)
+ D(Level - Correct. - High -
Inspect.)
B(Level - Correct - High) +
D(Level - Correct. - High -
Inspect.)
Decode with LI16 + D(Level -
Correct. - High - Inspect.)
0
1
2
3
- - - -
(0); B(Level
- Correct -
Inspection)
+ D(Level
- Correct
- High -
Inspect.)
OEM
US04 Control Type = Digital
Speed Selection
B(Level - Correct - Inspection)
+ D(Level - Correct. - High -
Inspect.)
B(Level - Correct - Inspection) +
D(Level - High - Inspect. - Interm.)
B(Level - Correct - Inspection)
+ D(Inspection - Level - High -
Interm.)
0
4
8
8.1 Parameter List Reference v3.34
8. Parameter Reference

 Loading...
Loading...
















