PI1 Process Interface (optional)
58 Power Analyzer NORMA 4000, NORMA 5000
EO1111G REV G
The sense of direction is detected by means of a permanent signal
(L = sense of direction positive, H = sense of direction negative);
alternatively, it might be determined using an incremental encoder.
In this case, the following applies: if the signal is leading, the sense
of direction is positive; if the signal is lagging, the sense of
direction is negative.
9.3 Configuring PI1
Prior to starting the measuring process, the torque sensor and the
speed sensor must be configured. To configure the process
interface, select menu Motor / Generator Setup. The configuration
procedure consists of the following steps:
- Call up Motor / Generator Setup
- Select motor
- Configure torque sensor
- Configure speed sensor
- Configure other motors
- Configure analog outputs
The device must be equipped with a PI1 process interface.
Menu item PI must be shown in the menu bar
If the analyzer is equipped with a process interface, menu item PI
is shown automatically in the menu.
Move the cursor to menu item PI and press Enter.
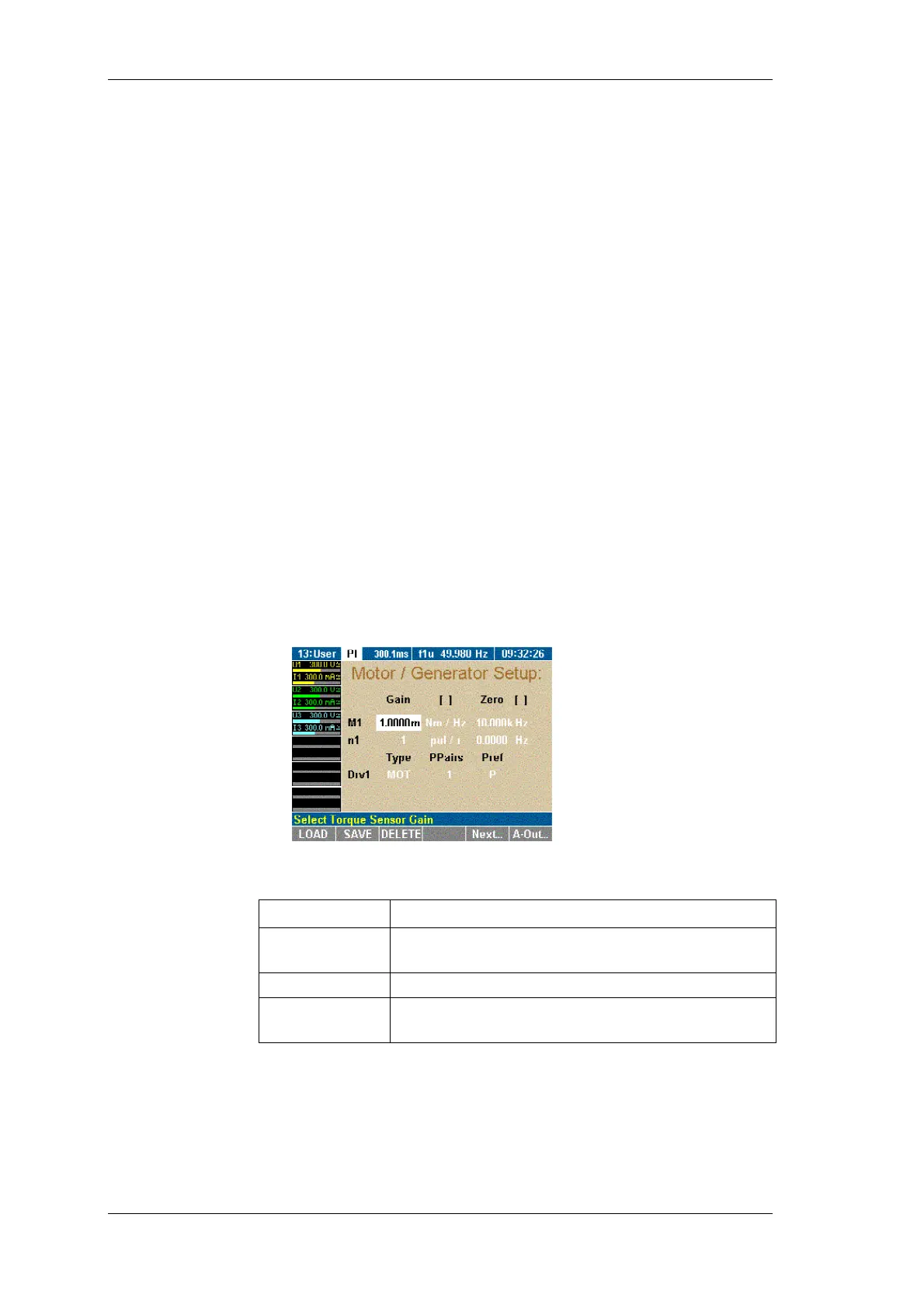
Menu Motor / Generator Setup is displayed, showing the
settings for motor 1 (M1).
Adjust the settings as follows:
Line Description
M1
Configure torque measurement (input, slope and
zero) for each motor
n1
Configure speed measurement (speed sensor)
Drv1
Set type (Type), pole pairs (PPairs) and
reference power (Pref)
If you have already saved a configuration that suits the
measuring layout: press function key LOAD, select this
configuration and confirm with Enter.
Adjust configuration as described below.
Sense of
direction
Call up Motor /
Generator Setup