Page 55 of 96
© 2020 LINAK A/S
Recovery mode:
Recovery run mode:
The purpose of recovery run mode is to have the ability to move the actuators at a reduced performance, even if
one of the actuators in the system has lost its position (eg. due to failure with CRC, Hall or EOS). The movement
in steps will indicate to the user that something is wrong.
Since the position is unknown to at least one actuator in the system, the parallel system wil move without syn-
chronisation. This introduces the risk of unaligned movement if one of the actuators is physically unable to move.
Recovery run mode will not engage if a wrong number of actuators is connected in the system.
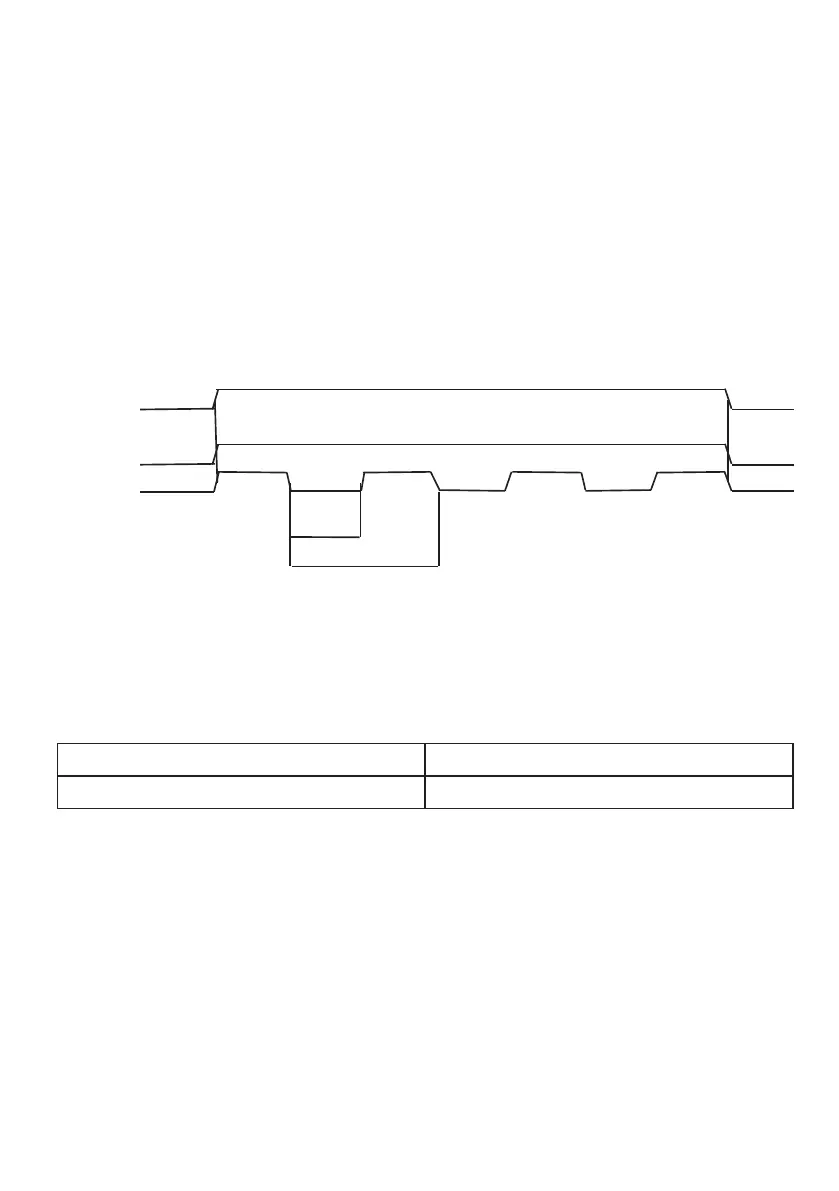
If recovery run mode is engaged, it will cause a movement as shown below:
tStop 2000ms
tRunning Time 4000ms
Button
Normal run
Recovery run
tStop
tRunning Time