20-502 20-502
Figure 20-17 Sample program
M_Mxt (CPU number) is a special variable that can communicate state between CPUs. Take the timing of
starting and ending cooperative operation using this variable.
When coordinated operation is controlled from a robot program, the robot 1 executes a movement command
while the robot 2 is executing the Mxt command. If the slave side cannot keep up with over speed or outside the
operating range, it generates an error and stops.
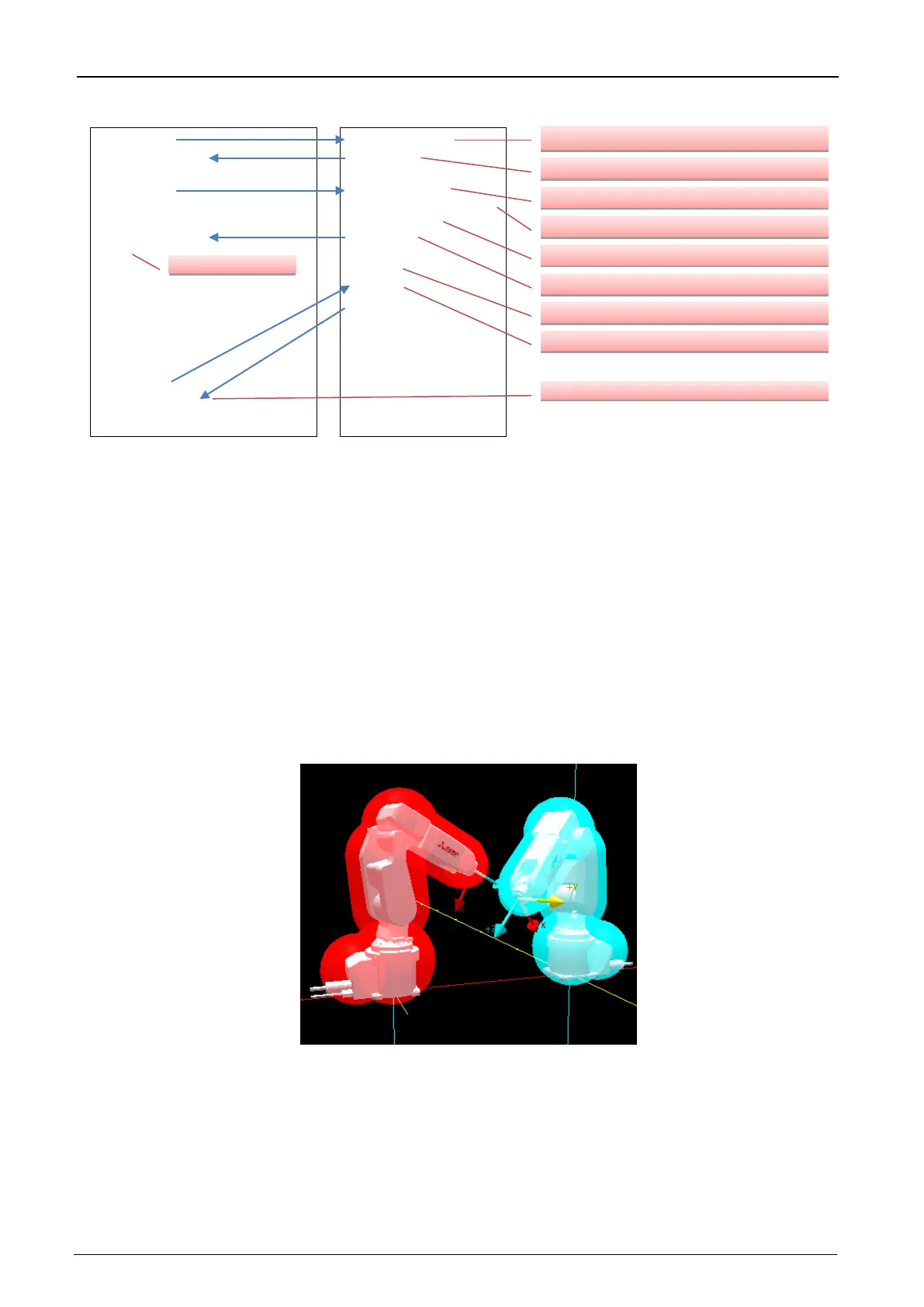
20.4.2. Interference avoidance
It is possible to operate the robot while checking interference with other robots.
For details, refer to the instruction manual “Detailed explanations of functions and operations 5.24 Interference
avoidance function”.
Also, refer to "13.3.15 Collision avoidance parameters" for how to set the interference avoidance parameters
with this software.
Figure 20-18 Image of interference check with two robots
M_Mxt(2)=0
Wait M_Mxt(3)=0
'
M_Mxt(2)=1
'
'
Wait M_Mxt(3)=1
Hlt
'
Cnt 1
Dly 0.5
Ovrd 15
'
‘ Automatic operation execute here
'
M_Mxt(2)=0
Wait M_Mxt(3)=0
Hlt
Wait M_Mxt(2)=0
M_Mxt(3)=0
'
Wait M_Mxt(2)=1
Open "MXT:QRBUS2" As #1
Mov P_GCurr(2)
M_Mxt(3)=1
'
Mxt 1,0
'
M_Mxt(3)=0
Hlt
:
Wait for preparation completion of robot 1
:
Wait for preparation completion of robot 2
2:
Wait for activation request from robot 1
2:
Open shared memory of robot 1 (# 1)
:
Move to the current position of the robot 1
:
Wait for activation request from robot 2
:
Start cooperative operation with reference to #1
:
End of coordinated operation
:
Wait for completion of completion from robot 2

 Loading...
Loading...

