556
Double-precision Floating-point Instructions Section 3-15
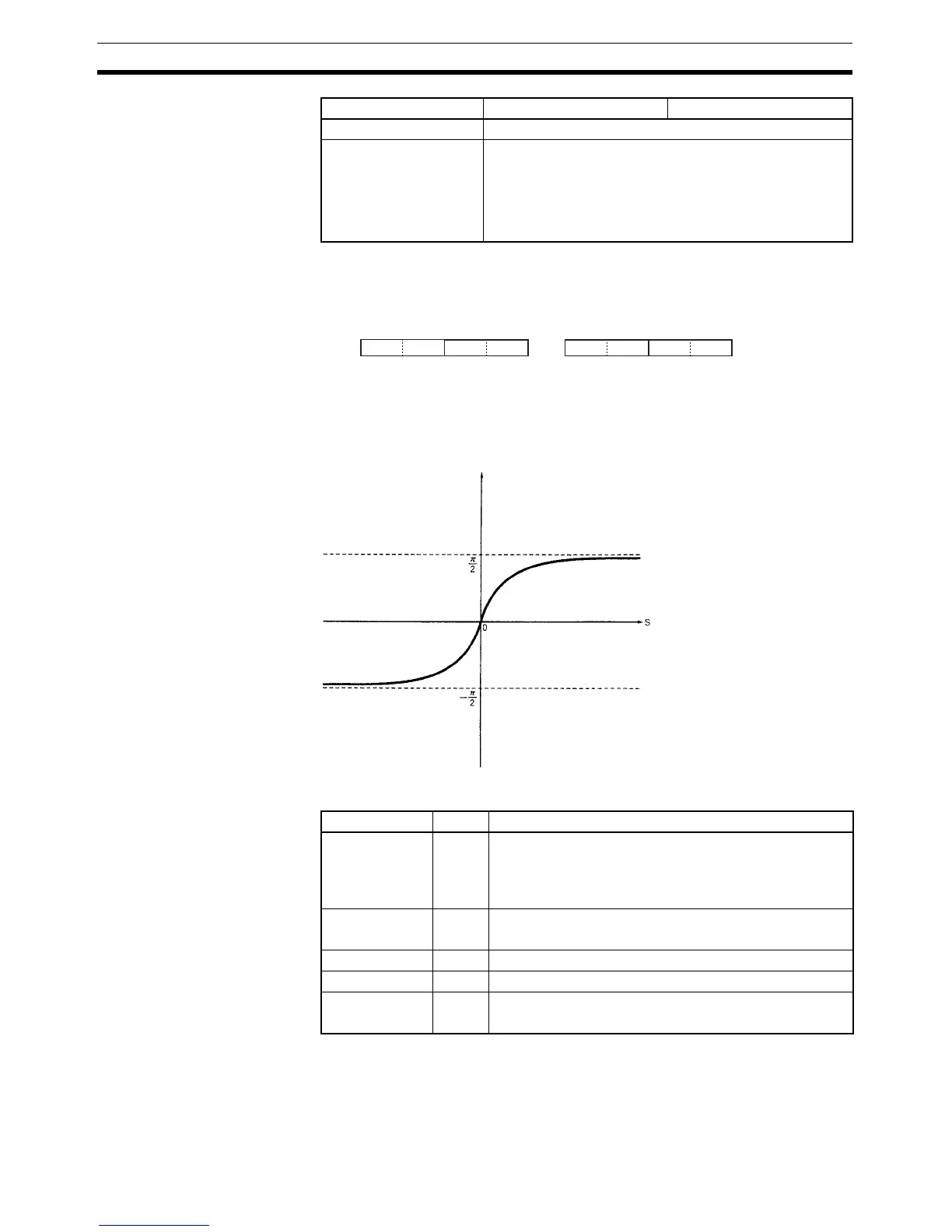
Description ATAND(856) computes the angle (in radians) for a tangent value expressed as
a double-precision (64-bit) floating-point number in words S to S+3 and places
the result in D to D+3.
(The floating point source data must be in IEEE754 format.)
The result is output to words D to D+3 as an angle (in radians) within the
range of –
π/2 to π/2.
The following diagram shows the relationship between the input data and
result.
Flags
Precautions The source data in words S to S+3 must be in IEEE754 floating-point data for-
mat.
Index Registers ---
Indirect addressing
using Index Registers
,IR0 to ,IR15
–2048 to +2047 ,IR0 to –2048 to +2047 ,IR15
DR0 to DR15, IR0 to IR15
,IR0+(++) to ,IR15+(++)
,–(– –)IR0 to, –(– –)IR15
Area S D
S+1 S ) →TAN
–1
( S+3 S+2 D+1 DD+3 D+2
R
S: Input data (tangent)
R: Result (radians)
Name Label Operation
Error Flag ER ON if the source data is not recognized as floating-point
data.
ON if the source data is not a number (NaN).
OFF in all other cases.
Equals Flag = ON if both the exponent and mantissa of the result are 0.
OFF in all other cases.
Overflow Flag OF Unchanged
Underflow Flag UF Unchanged
Negative Flag N ON if the result is negative.
OFF in all other cases.