620
Data Control Instructions Section 3-17
Performance Specifications
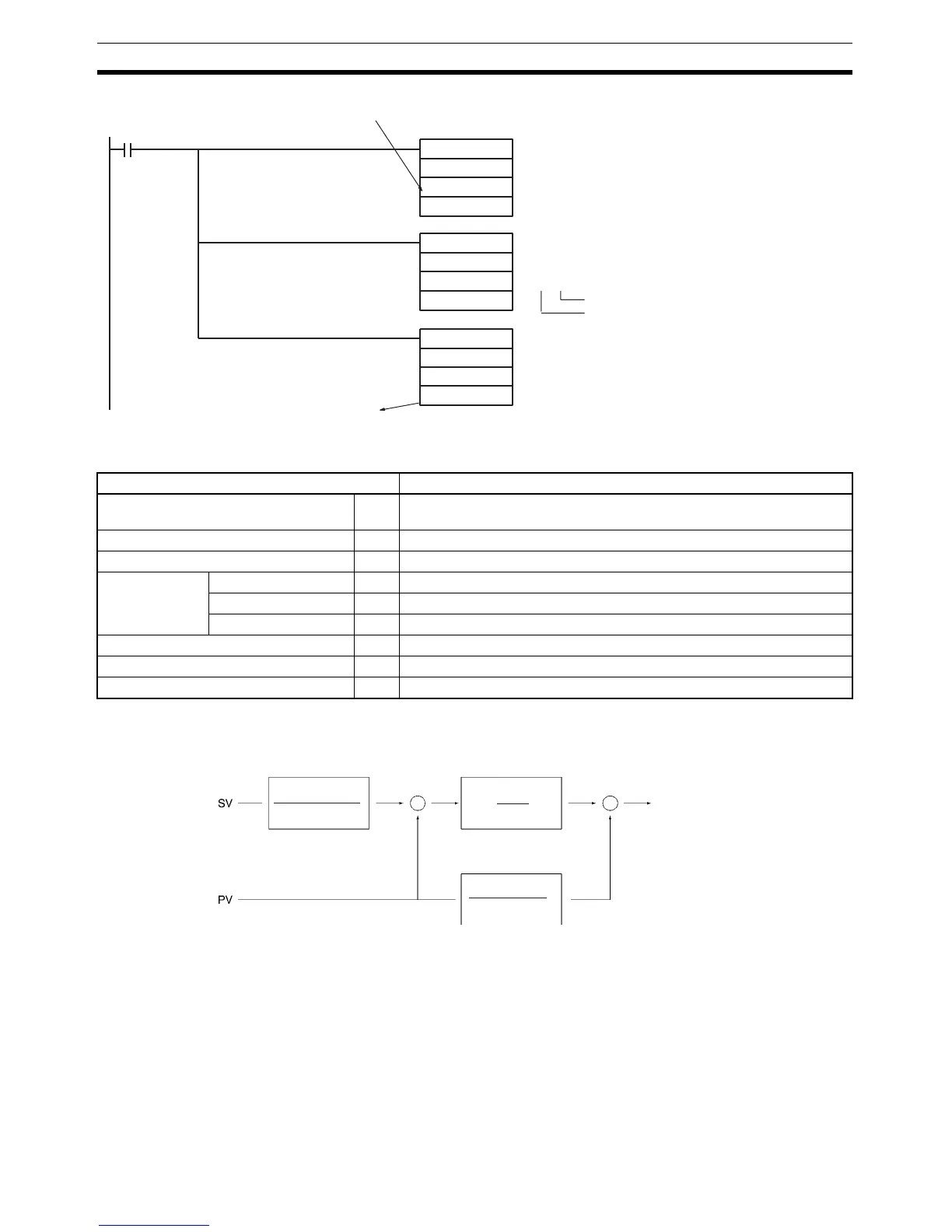
Calculation Method Calculations in PID control are performed by the target value filtered control
with two degrees of freedom.
Block Diagram for Target
Value PID with Two
Degrees of Freedom
When overshooting is prevented with simple PID control, stabilization of dis-
turbances is slowed (1). If stabilization of disturbances is speeded up, on the
other hand, overshooting occurs and response toward the target value is
slowed (2).
When target-value PID control with two degrees of freedom is used, on the
other hand, there is no overshooting, and response toward the target value
and stabilization of disturbances can both be speeded up (3).
Item Specifications
PID control method --- Target value filter-type two-degrees-of-freedom PID method (forward/
reverse)
Number of PID control loops --- Unlimited (1 loop per instruction)
Sampling period τ 0.01 to 99.99 s
PID constant Proportional band P 0.1 to 999.9%
Integral constant Tik 1 to 8191, 9999 (No integral action for sampling period multiple, 9999.)
Derivative constant Tdk 0 to 8191 (No derivative action for sampling period multiple, 0.)
Set value SV 0 to 65535 (Valid up to maximum value of input range.)
Measured value PV 0 to 65535 (Valid up to maximum value of input range.)
Manipulated variable MV 0 to 65535 (Valid up to maximum value of output range.)
APR
PID
APR
D1000
D2000
D2000
D2500
D3000
D3000
D1500
C (D1500):
C+1 (D1501):
C+2 (D1502):
C+3 (D1503):
C+4 (D1504):
C+1 (D1001):
C+2 (D1002):
C+3 (D1003):
C+4 (D1004):
C (D1000):
C+6 (D2506):
@8@8
Control Data
0000 Hex (binary with one table)
1770 Hex (Xm)
0000 Hex (Yo)
1770 Hex (X1)
FFFF Hex (Y1)
Control Data
0000 Hex (binary with one table)
FFFF Hex (Xm)
0000 Hex (Yo)
FFFF Hex (X1)
1770 Hex (Y1)
Control Data
Valid number of bits: 16 (0000 to FFFF Hex)
Valid number of bits: 16 (0000 to FFFF Hex)
From Analog Input Unit
Execution
condition
To Analo
 Loading...
Loading...



