100
Oxford Technical Solutions
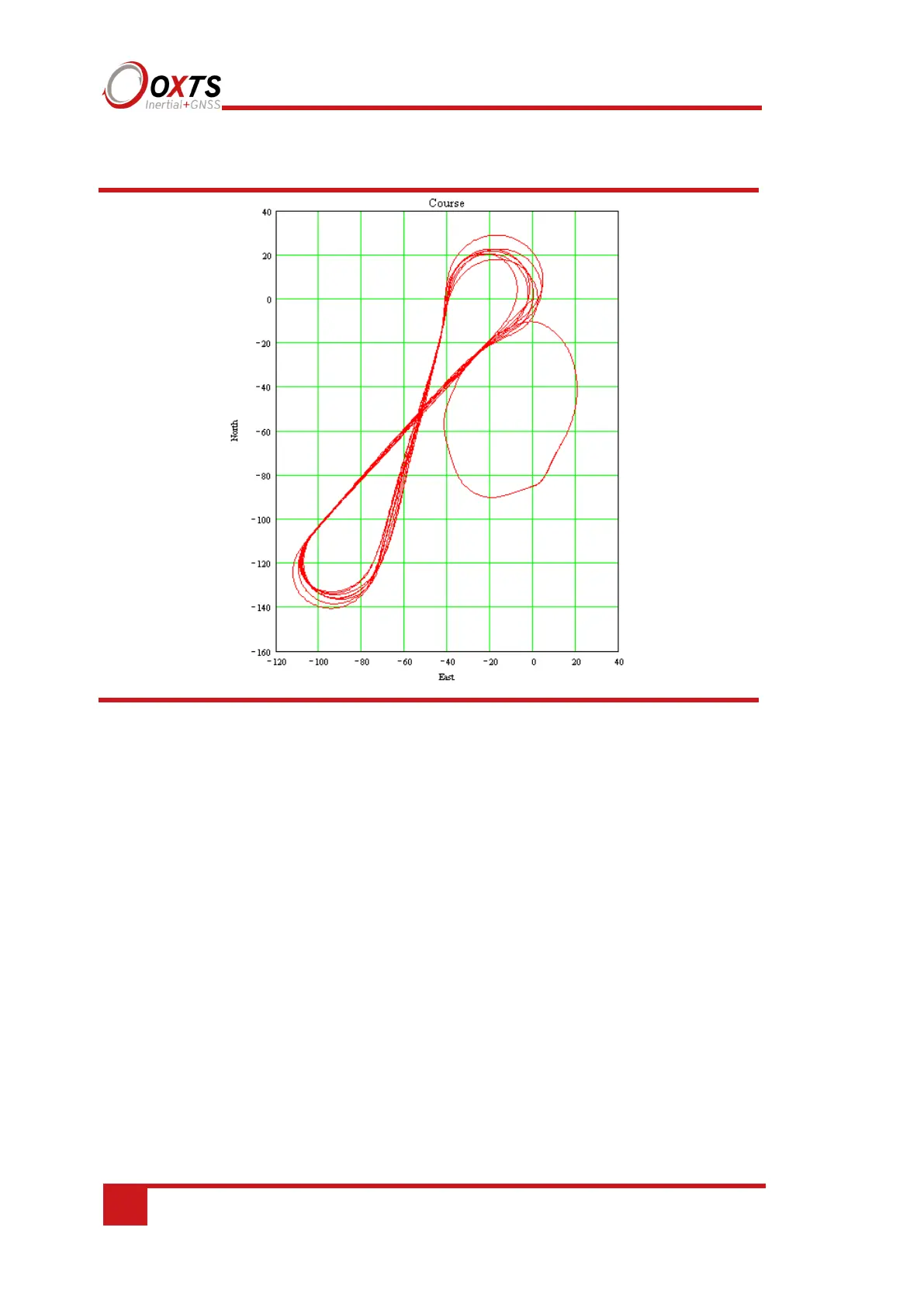
Figure 47. Example warm-up driving route
At the start there is just a small amount of motion to get the RT3003 initialised. During
this time the Kalman filter cannot improve the position accuracy because the position of
the GNSS antenna is not known accurately and cannot be estimated without motion. The
accuracy of the velocity, roll and pitch steadily improves as the Kalman filter places more
and more weight on the inertial sensors. At this point the heading accuracy is worse than
the scale of the graph ((d) in Figure 48); the heading is not accurate and the dual antenna
system cannot measure the angle of the GNSS antennas compared to the inertial sensors,
so the dual antenna cannot provide accurate information.
Just after 500 s the RT3003 is driven (it is the small loop on the east side in Figure 47,
not the figures of eight). This small amount of driving is sufficient for the Kalman filter
to gain confidence in the antenna position and to improve the alignment of the two GNSS
antennas compared to the inertial sensors. After this period the position accuracy is better
than 1 cm and the heading is better than 0.2°.