91
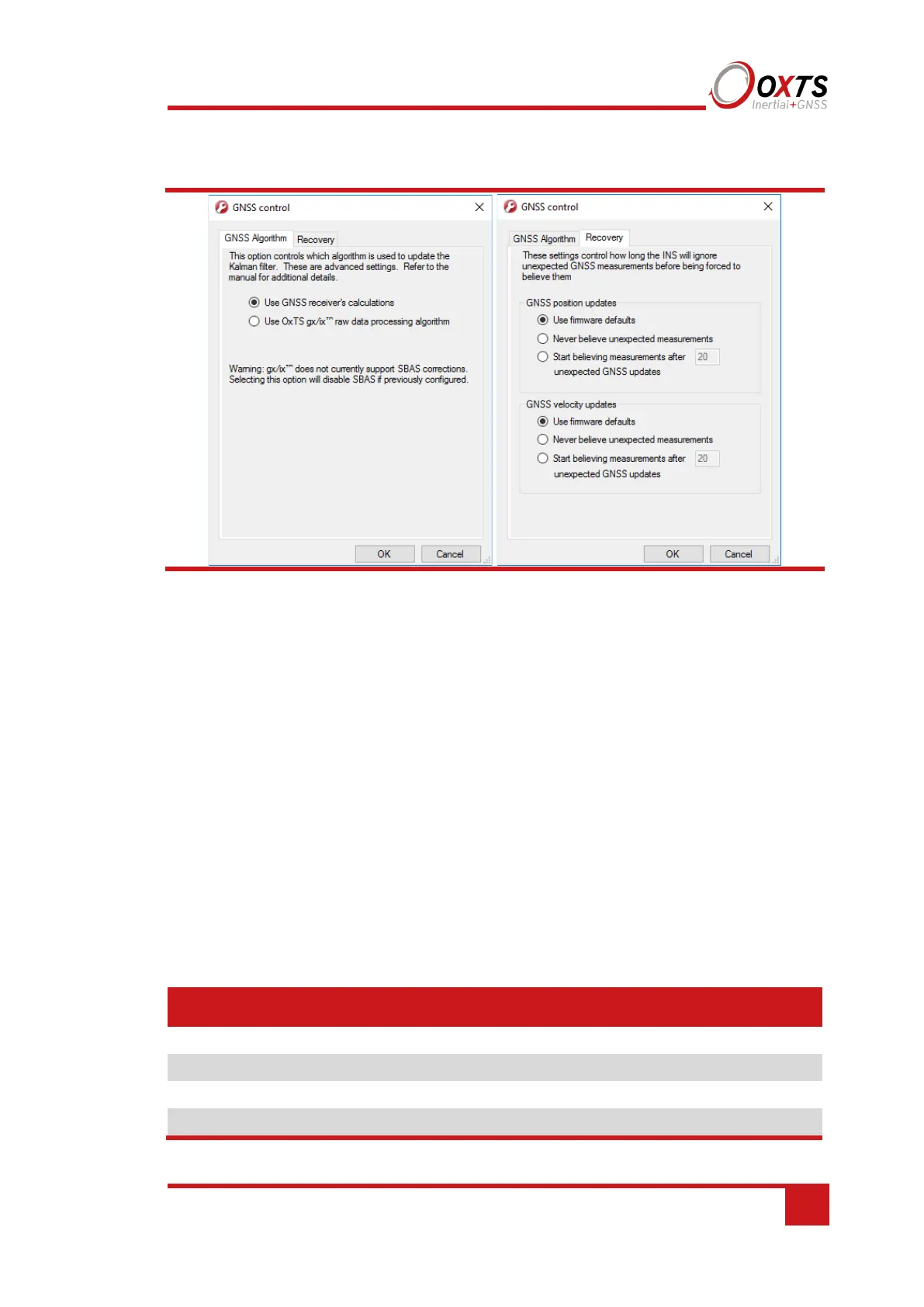
Figure 42. NAVconfig GNSS control properties window
The GNSS algorithm tab gives a choice of two algorithms for computing the GNSS
measurements. The default option is to use the algorithm provided by the GNSS receiver.
Using this algorithm the RT will accept position and velocity from the GNSS and use it
to update the Kalman filter.
The gx/ix raw data processing algorithm uses the raw data from the GNSS and custom
algorithms to compute position and velocity tailored to the needs of the Kalman filter. It
also improves performance in poor GNSS environments using single satellite aiding
technology and tightly coupled GNSS and inertial measurements. Gx/ix mode is
recommended to achieve the highest accuracy in environments where RTK lock may be
difficult to maintain.
Note: gx/ix processing is a new technology and is still being developed and improved.
As such there are some limitations to its compatibility. Table 34 details the current
compatibilities of gx/ix mode.
Table 34. gx/ix compatibility
GNSS mode Real-time Post-process
SPS
SBAS x x
DGPS
RTK x