AX10 Palletizing Solution
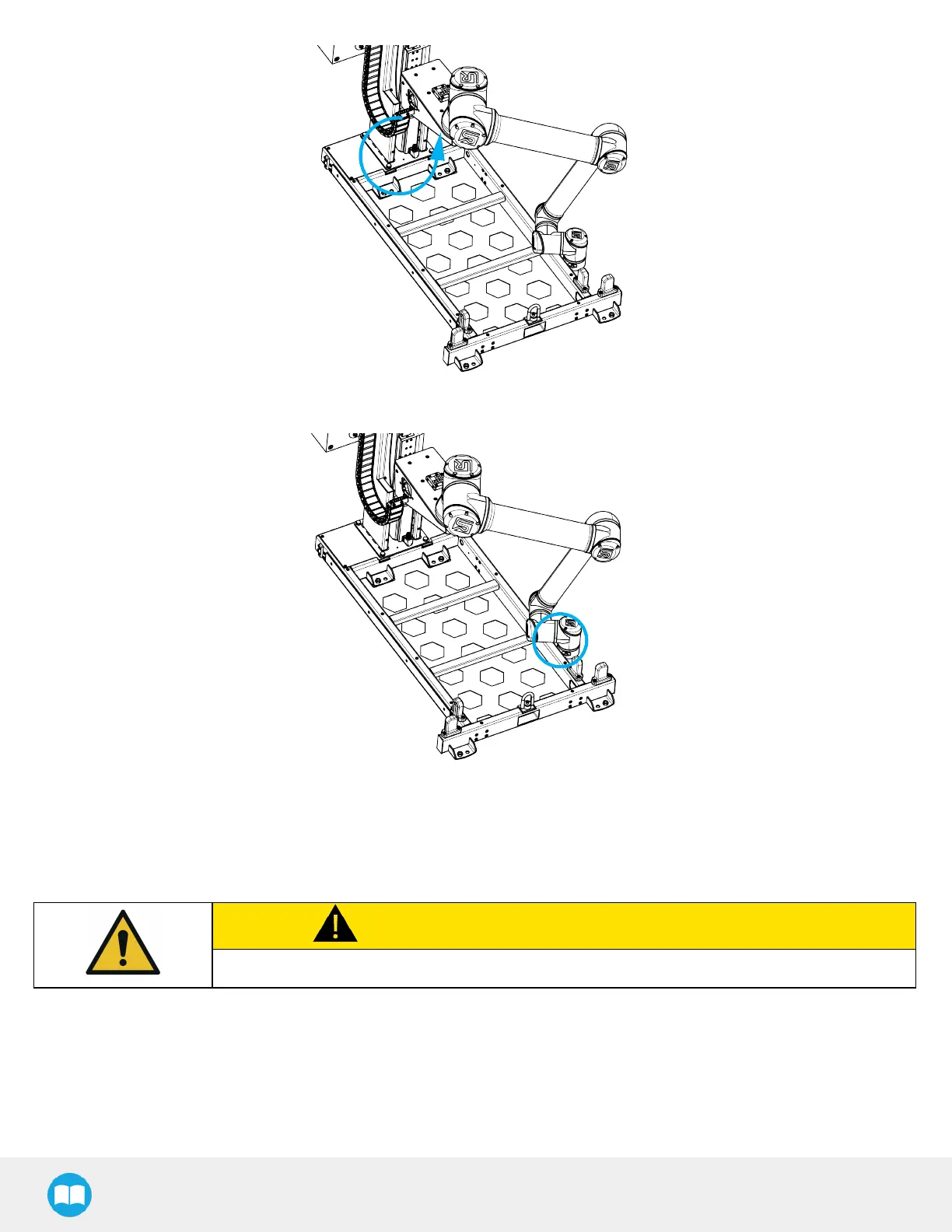
3. Position the robot so that the wrist is on the outer left side of the base, as shown in the figure below.
4. Jog the robot so that the robot tool flange is parallel to the ground: change the feature reference to Base, select Rotation
Vector from the Units dropdown menu, and set the tool orientation to the following values: RX=0°, RY= 180°, RZ=0°.
5. In the Installation tab, set the TCP value to [0, 0, 0].
6. Set the Tool Position's X value (base reference) to 333.35 mm.
CAUTION
Move the robot slowly and monitor the movements to avoid collisions.
7. Rotate the column clockwise so that the side of the robot wrist touches the side of the base, as depicted in the figure below.
48