AX10 Palletizing Solution
2. Robot Positioning
l
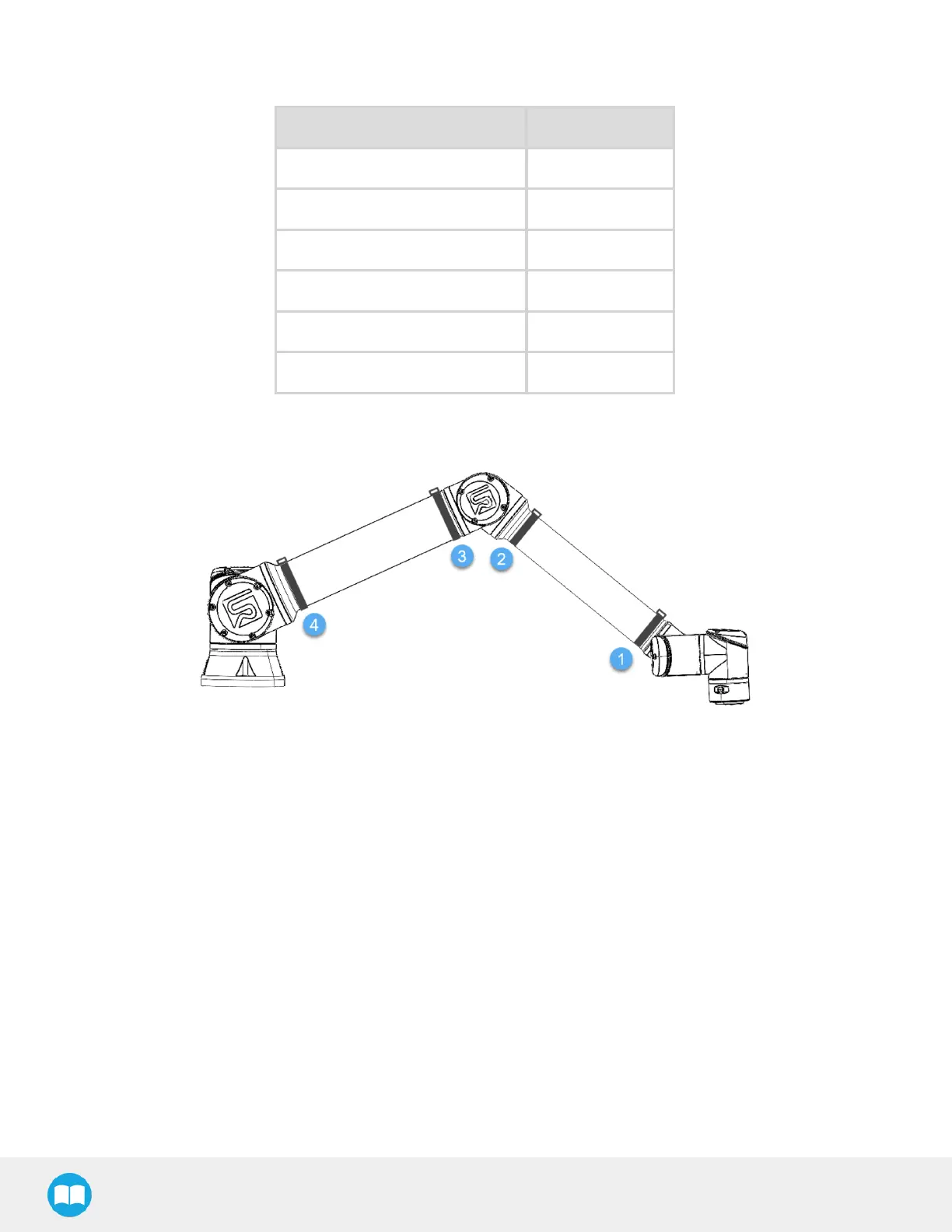
Change the robot's position to install the cable routing system appropriately. Please refer to the table below.
Joint Position
Base 0°
Shoulder -155°
Elbow -60°
Wrist 1 -55°
Wrist 2 90°
Wrist 3 90°
3. Cable Clip Installation
l
Install the four (4) cable clips with a 0.5 m hook and loop fastener at positions #1, #2, #3 and #4. Please refer to the figure
above for visual reference.
l
If applicable, rotate all cable clips so that the plastic mount is facing up; this will ensure the good positioning of the
tubing.
4. Tubing Installation
l
Connect the end of the 10 mm double air tube labeled TOOL SIDE to the pneumatic elbow fittings of the PowerPick10
Vacuum Gripper’s manifold at the end of the robot arm.
l
Push the air tube until fully seated.
l
Find the metallic mark on the tubing that is closest to the gripper (there are five (5) metallic marks in total on the tubing).
l
At the metallic mark, tightly attach the tubing to the cable clip using a cable tie (red component in the figure below).
54