© by SEMIKRON / 2017-09-07 / Technical Explanation / SKiiP
4
Page 27/73
5.2.8 CANbus interface
The CANbus interface employs comprehensive interaction with the SKiiP 4, e.g. it provides the possibility to
read out the type of error occurred and when it occurred. In addition to this, the CAN-interface is used to
parameterize and configure, e.g.to activate/deactivate dedicated features of the SKiiP
®
4, and to allow a
customization to a certain extent. That configuration through the CAN bus allows protection parameter
settings like the DC-link trip function for example as well as the activation of a dedicated function to ride
through extraordinary wind turbine specific application conditions. For further details please refer to the
FRT-function (see Chapter 7.7) or DC-Link trip level deactivation.
Please note: By deactivating the supervision of V
DCtrip
the related SKiiP4 data sheet limits must be
strictly observed by the user. The violation of these limits can lead to the threat to life or physical
condition, as well as to a damage of the SKiiP.
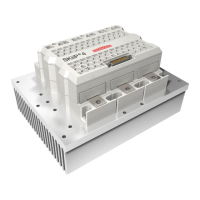
The CAN-Interface is available at Pins 11 and 12 (CAN_H) and at the Pins 24 and 25 (CAN_L) as shown in
Figure 5.11.
Figure 5.11: CAN-Interface
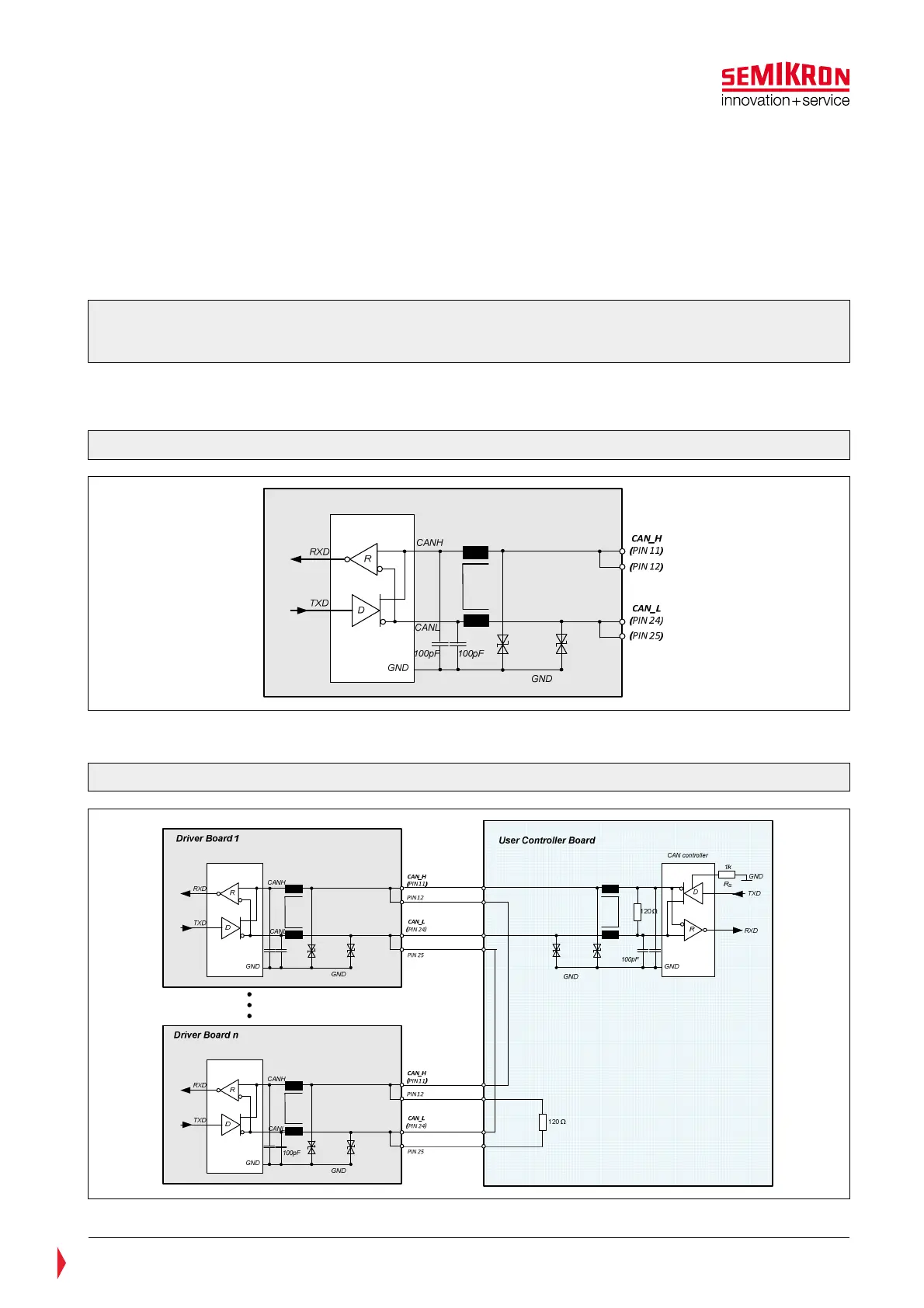
If several SKiiP
®
4 units are used: A CAN-application example as shown in Figure 5.12 is recommended.
Figure 5.12: CAN – application example for several SKiiP