Parameter assignment
3.5 Function parameters
SIMOTION ADI4 - Analog Drive Interface for 4 Axes
52 Manual, 05/2009, 6FC5 297-0BA01-0BP6
3.5.9 Homing using external zero mark
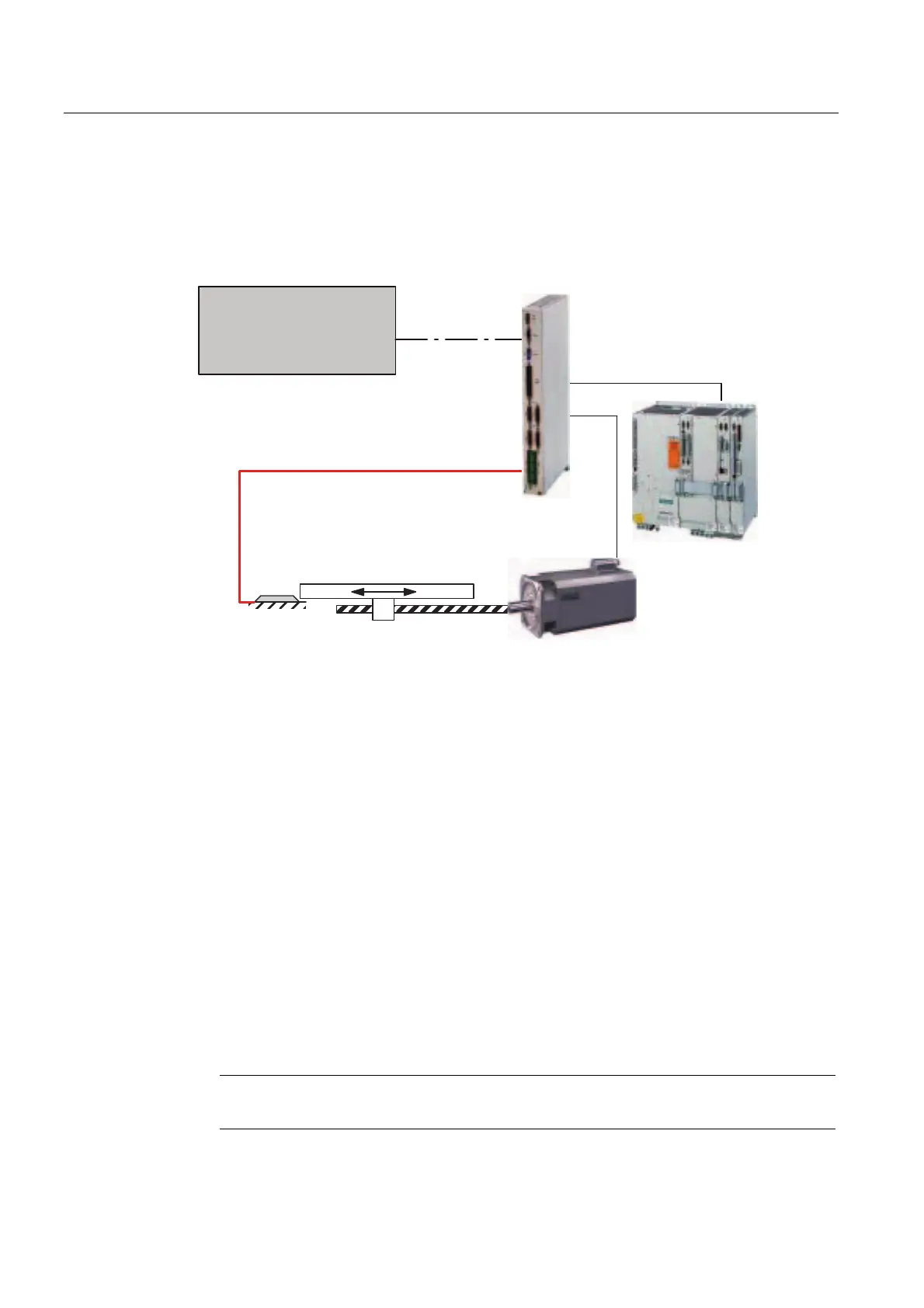
System structure
&RQWUROOHUHJ
,QYHUWHUV\VWHPHJ
$QDORJVHWSRLQW
$FWXDOHQFRGHUYDOXH
6,02'5,9(ZLWKFRQWURO
XQLWZLWKDQDORJVHWSRLQW
LQWHUIDFH
'LJLWDOLQSXWVHJ$[LV
;ದ3LQ
([WHUQDO]HURPDUN
VLJQDO
([WHUQDO]HUR
PDUN
0RWRUHJ)7
$[LVHJPDFKLQLQJWDEOH
7HFKQRORJ\&38
ದ6,180(5,.'
ದ6,180(5,.'L
ದ6,027,21
ದ6,0$7,&
352),%86'3
$',
Figure 3-6 Basic system structure: Homing using external zero mark
Function
Once the controller requests homing, the ADI4 transmits the actual encoder value to the
controller as the home position the next time it detects an external zero mark signal.
Without 611U conformant mode
The controller must define the relevant function via encoder control word G1_STW:
● Function 2 (Homing via rising edge of external zero mark)
● Function 3 (Homing via falling edge of external zero mark)
With 611U conformant mode
The relevant signal for the axis to be homed (e.g. Axis 1) must be set in the digital output
word:
● Digital output word:
Bit 0: = 1 ⇒ "Axis 1: Rising edge of external zero mark 1 (X6-2, Pin 2)"
Note
Homing using an external zero mark requires 611U conformant mode to be selected.