,-
,-
,-
,_,
,-
.
=•
,-
(Frequency Setting Parameters)
,,-,,-
,_,,_,,_,
Related parameters
I,_:
0 G I
Jog
run frequency
Jogging
operation
IJSt:
F'I
Jog stop control
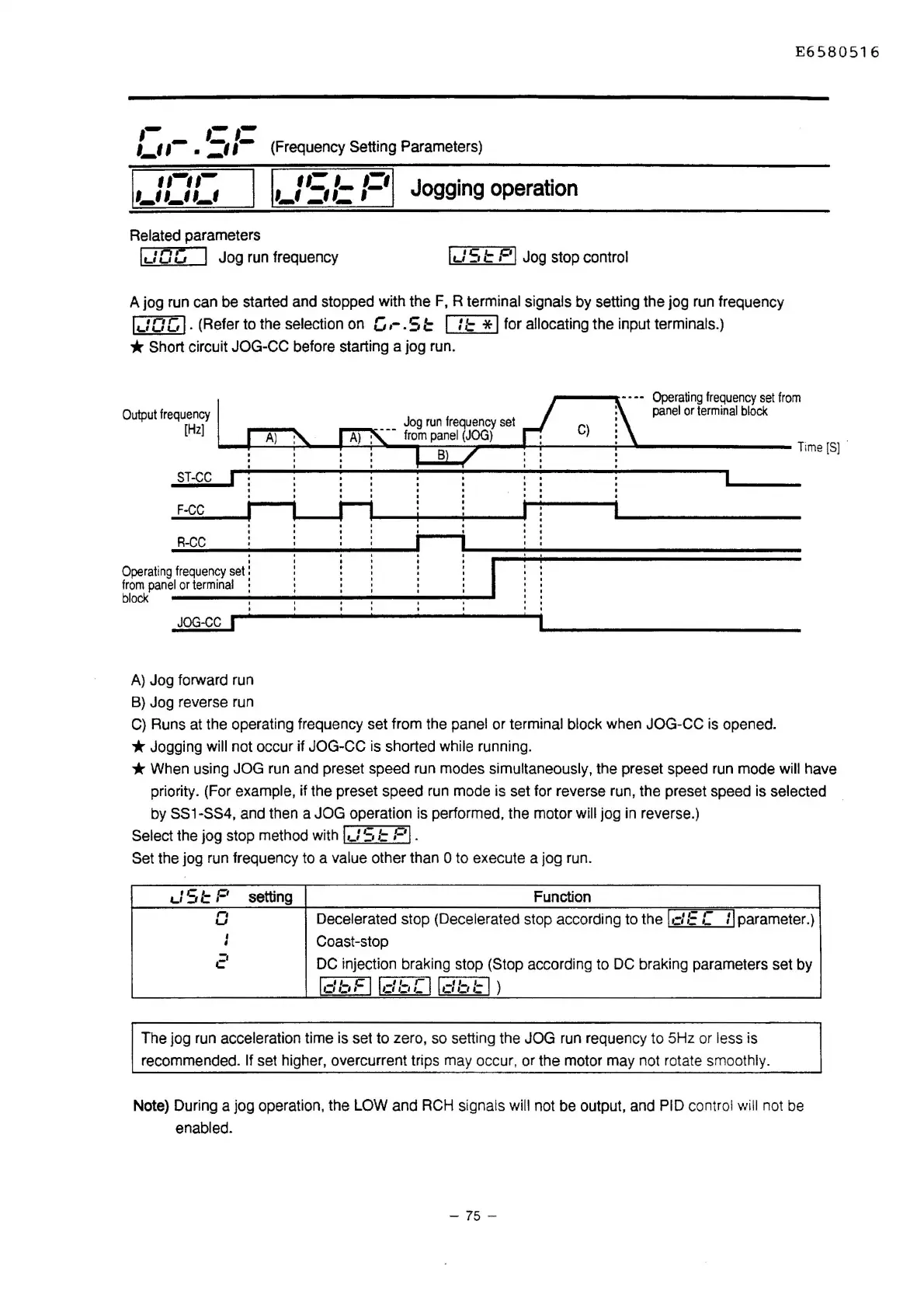
A
jog
run can
be
started and stopped with the
F,
R terminal signals by setting the jog run frequency
I,_:
O [,I. (Refer to the selection on G ,-.
SI::
I It: *I for allocating
the
input terminals.)
* Short circuit
JOG-CC
before starting a jog run.
E6580516
--------
Operating
frequency
set
from
Output
frequency
[Hz]
ST-CC
F-CC
R-CC
'
Operating
frequency
set
:
from
panel
or
terminal
:
block
JOG-CC
A)
Jog
forward run
8)
Jog reverse run
panel
or
terminal
block
.
.............
r1~~-+-~..,._~__,.
C}
Runs at the operating frequency set from the panel or terminal block when
JOG-CC
is opened.
* Jogging
will not occur if JOG-CC is shorted while running.
*When
using JOG run and preset speed run modes simultaneously, the preset speed run mode will have
priority. (For example, if the preset speed run mode is set for reverse run, the preset speed is selected
by SS 1-SS4, and then a
JOG
operation is performed, the motor will jog in reverse.}
Select the jog stop method with
I,_:
5 t
F'I
.
Set the jog run frequency to a value other than 0
to
execute a
jog
run.
,_:
51::
F'
setting
Function
r1
Decelerated stop (Decelerated stop according to the ldE [
II
parameter.}
u
I
Coast-stop
I
2
DC injection braking stop (Stop according to DC braking parameters set by
ldbF
I
ldb[
I
ldbt
I)
The jog run acceleration time is set to zero, so setting the JOG run requency to 5Hz or less is
recommended. If set higher, overcurrent trips may occur, or the motor may not rotate smoothly.
Note) During a jog operation, the
LOW
and RCH signals will not be output, and PIO control will not be
enabled.
- 75 -

 Loading...
Loading...








