,-
,-,
1_11-
•
,-,-
(Protection Parameters)
1-
I
1-
f I f
1-11-
I
=··=
,_
,
,_,,-
=··-
::=::::::::::====~
Trip function selections
'
I I
l=I
1-11
1-
I
_,_
,_,
·-··=
=··-
,-,I_
I
I_
-
1-
I
,_,,_
,_
,_,
,_
,_
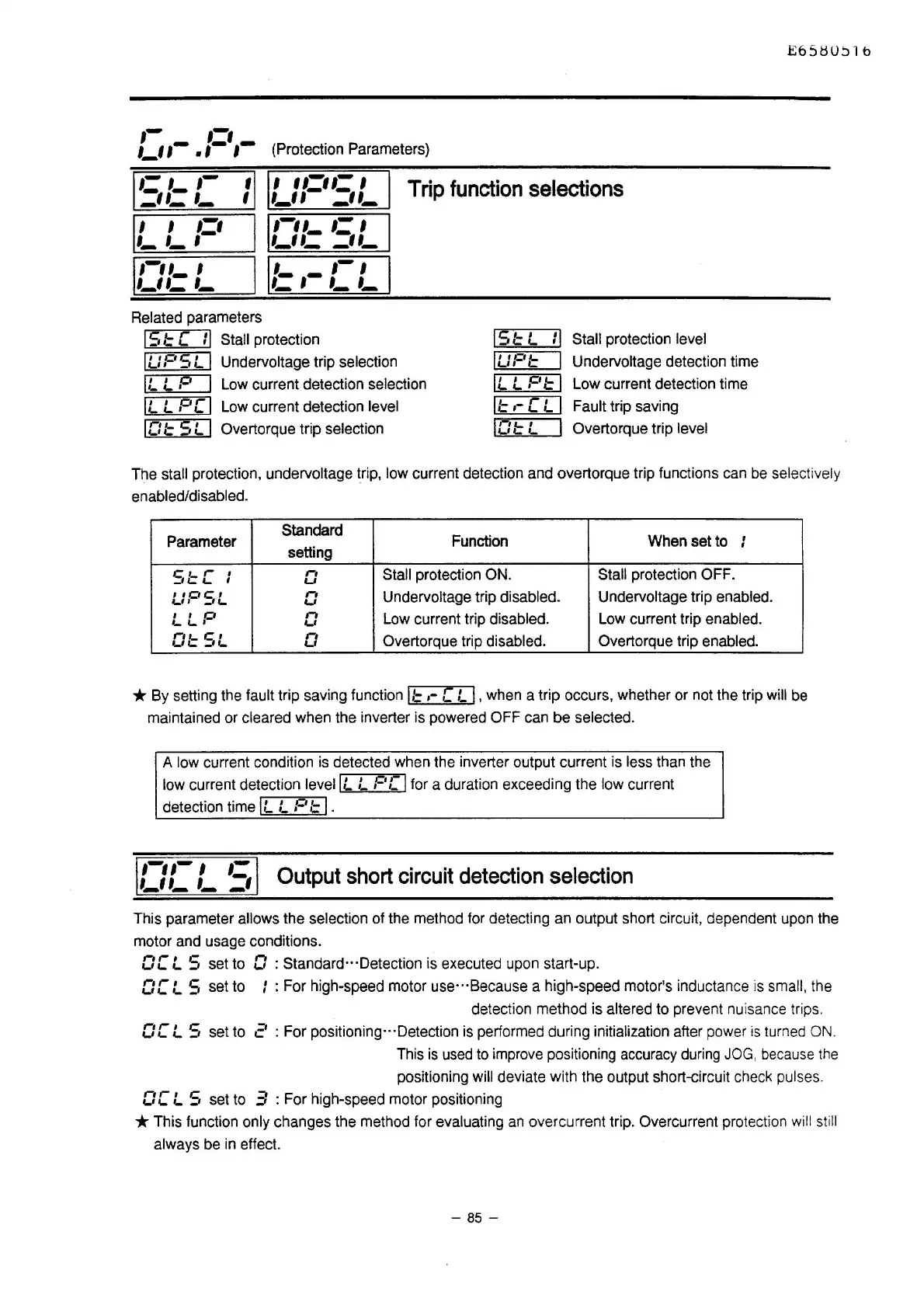
Related parameters
!St[
'
Stall protection
IStL
Stall protection level
IUF'SL
Undervoltage trip selection
IUF't
Undervoltage detection time
ILL
F'
Low current detection selection
ILL
F't
Low current detection time
ILL
F'[
Low current detection level
lt,-CL
Fault trip saving
IC:t SL
Overtorque trip selection
IC:tL
Overtorque trip level
E658UYI
b
The stall protection, undervoltage trip, low current detection and overtorque trip functions can be selectively
enabled/disabled.
Parameter
Standard
Function When set to
I
setting
I
ScC
I
n
Stall protection ON.
Stall
protection OFF.
I
w
UF'SL
r'I
Undervoltage trip disabled.
Undervoltage
trip enabled.
w
LL
F'
,-,
Low current trip disabled.
Low current trip enabled.
LI
Cle
SL
r'I
Overtorque trip disabled. Overtorque trip enabled.
LI
* By setting the fault trip saving function
It,-
CL
I.
when a trip occurs, whether or not the trip will be
maintained or cleared when the inverter is powered
OFF can
be
selected.
A low current condition
is
detected when the inverter output current
is
less than the
low current detection
level
IL
:_
F'
C I for a duration exceeding the low current
detection time
I:_
:_
F'
•'=
I .
,-,,-'
,-
,_,
,_
,_
=•
Output short circuit detection selection
This parameter allows the selection of the method for detecting an output short circuit, dependent upon the
motor and usage conditions.
[I
[ L S set to
[I
: Standard···Detection is executed upon start-up.
QC
LS
set to : : For high-speed motor use···Because a high-speed motor's inductance
is
small, the
detection method is altered to prevent nuisance trips.
[I
[ L S set to 2 : For positioning···Detection
is
performed during initialization after power
is
turned
ON.
This
is
used to improve positioning accuracy during
JOG,
because the
positioning
will deviate with the output short-circuit check pulses.
[I
[ L S set to 3 : For high-speed motor positioning
*This
function only changes the method for evaluating
an
overcurrent trip. Overcurrent protection will still
always be
in
effect.
- 85 -

 Loading...
Loading...








