E6580516
,-
,-
,_,,-
.,-
(Fundamental Parameters #1)
1·=··-
,
,_
Related parameters
V
/f
pattern
CD
IPc
I V/fpattern
lu
b I Voltage boost
l,_,L
I Maximum voltage frequency
[,
,-
.n
l=
In
l=
.P No. of motor poles
Inc.[
Motor rated capacity
In
l::
.t:: Motor type
In
l::
.u
Motor rated voltage
In
l::
. F Motor rated frequency
Int::.,-
Motor rated RPM
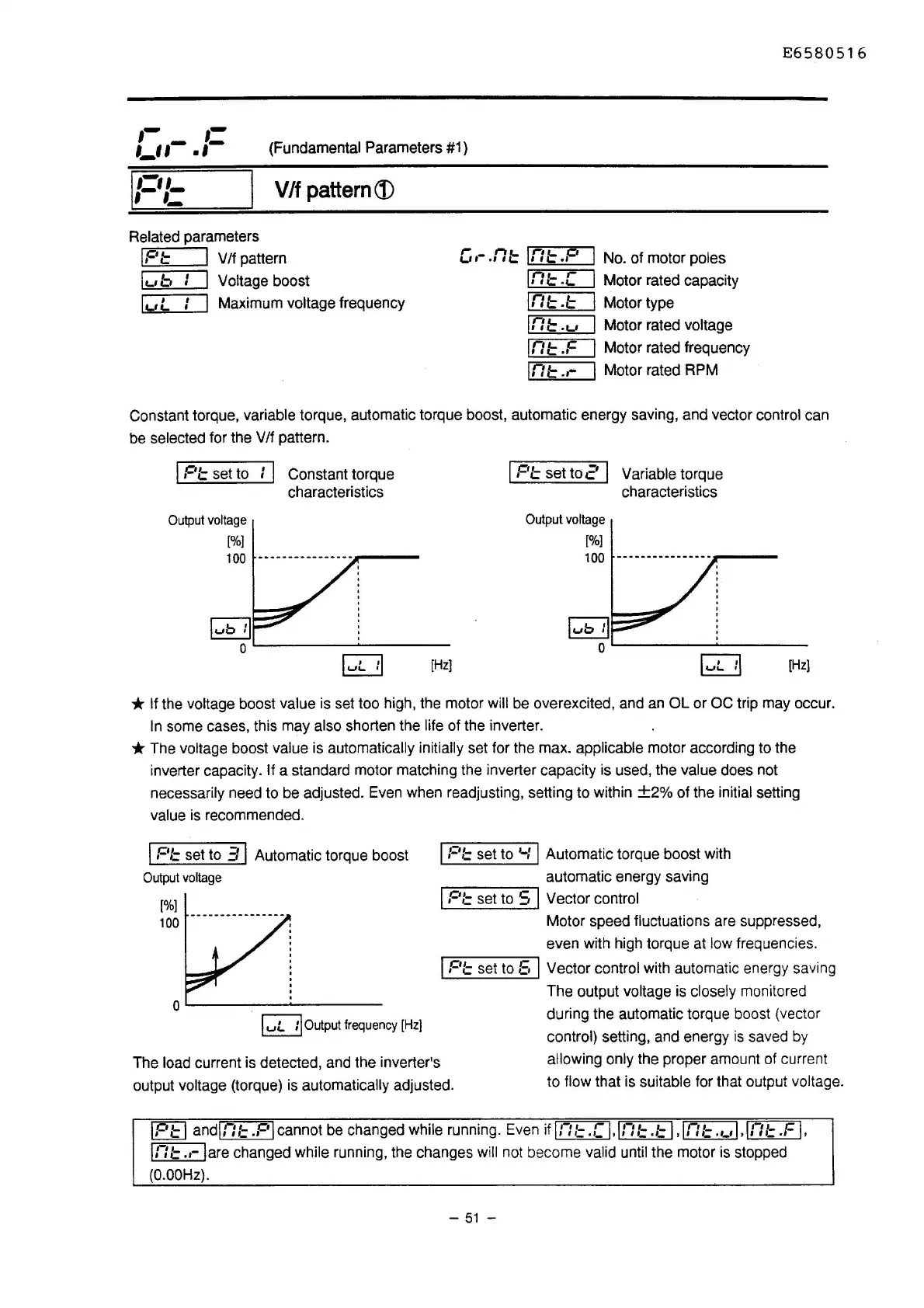
Constant torque, variable torque, automatic torque boost, automatic energy saving, and vector control can
be selected for the V/f pattern.
I
Pc
set to : I Constant torque
characteristics
Output
voltage
[%)
100
[Hz]
I
Pt::
set
toe'
I Variable torque
characteristics
Output
voltage
[%]
100
[Hz]
*If
the voltage boost value
is
set too high, the motor will be overexcited, and
an
OL or OC trip may occur.
In
some cases, this may also shorten the life of the inverter.
* The
voltage boost value is automatically initially set for the max. applicable motor according to the
inverter capacity.
If a standard motor matching the inverter capacity is used, the value does not
necessarily need to be adjusted. Even when readjusting, setting to within
+2%
of the initial setting
value
is
recommended.
I
Pc
set to
=:I
Automatic torque boost
Output
voltage
[%]
100
I
wl
:!output
frequency
[Hz]
I
Pc
set to '-l I Automatic torque boost with
automatic energy saving
~,
,-c•_c_s_e_t-to-S~I
Vector control
Motor speed fluctuations are suppressed,
even with high torque at
low frequencies.
-,
,-c•_c_s_e_t-to-E-,
I Vector control with automatic energy saving
The output
voltage is closely monitored
during the automatic torque boost (vector
control) setting, and energy
is
saved by
The
load current is detected, and the inverter's
output
voltage (torque)
is
automatically adjusted.
allowing only the proper amount of current
to
flow that is suitable for that output voltage.
u=EJ
andltlc.Picannot
be changed while running. Even iflf"J.'.:.C
l.lnc.c
l.lnt.,_,l.lllc.F
I.
Inc
.•
- lare changed while running, the changes will not become valid until the motor is stopped
(O.OOHz).
-
51
-

 Loading...
Loading...








