71
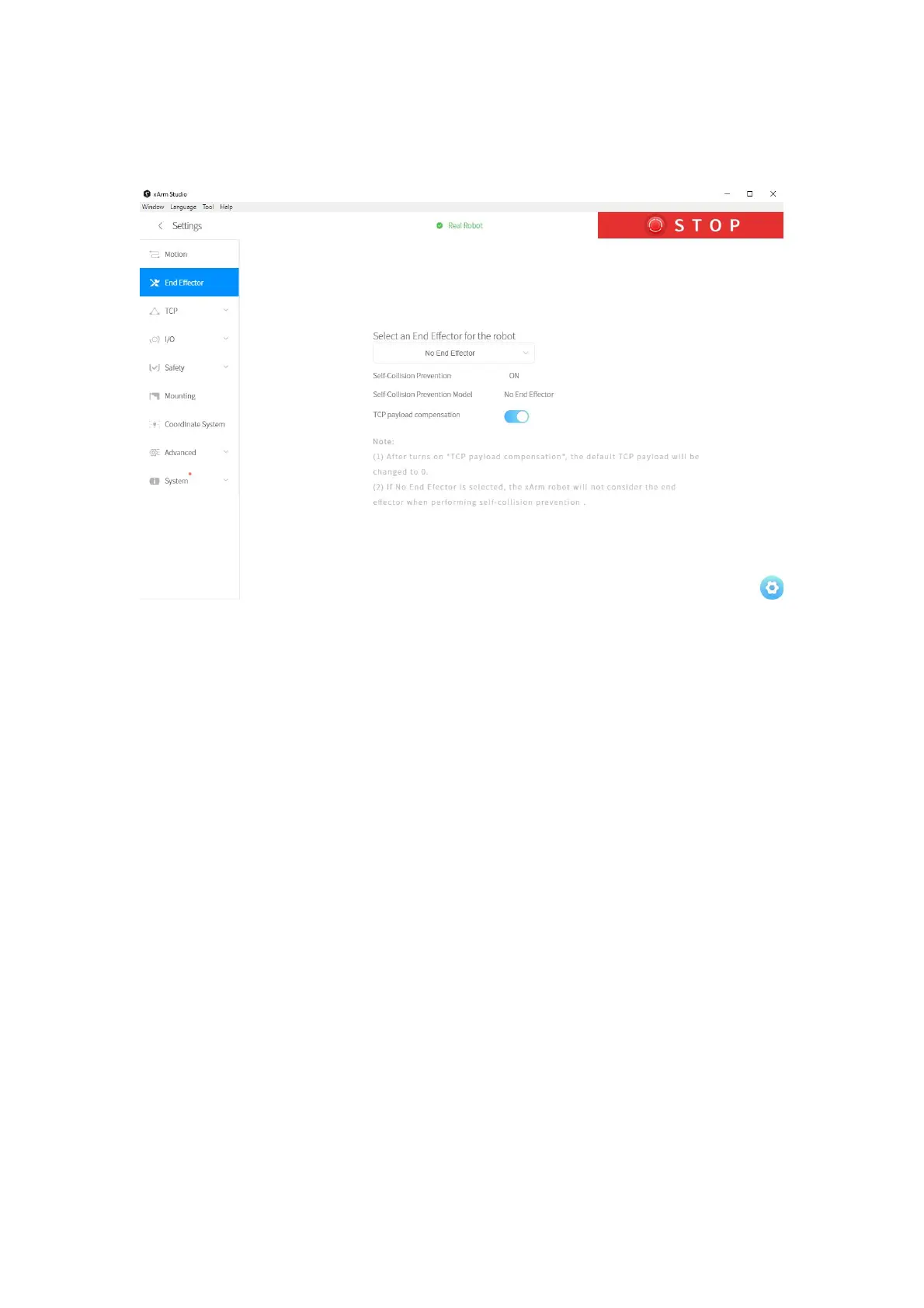
When no end effector is installed at the end of the robotic arm, select [No
End Effector]
1.4.3 TCP Settings
Set TCP Payload and TCP Offset according to the actual situation.
【TCP Payload】
● The load weight refers to the actual mass (end-effector + object ) in Kg; X/Y/Z-
axis represents the position of the centre of gravity of payload in mm, this position
is expressed in default TCP coordinate located at flange center(Frame B in the
above figure) . If there is virtually no load at the end, both TCP payload and centre
of gravity must be set to 0.
【TCP Offset】
● Setting the Tool Coordinate Offset with respect to the initial tool
frame located at the center of the flange (Frame B in the above figure) . The
position coordinates X, Y, and Z determine the position of TCP, while Roll, Pitch,
and Yaw determine the orientation. When the specified value is zero, TCP