74
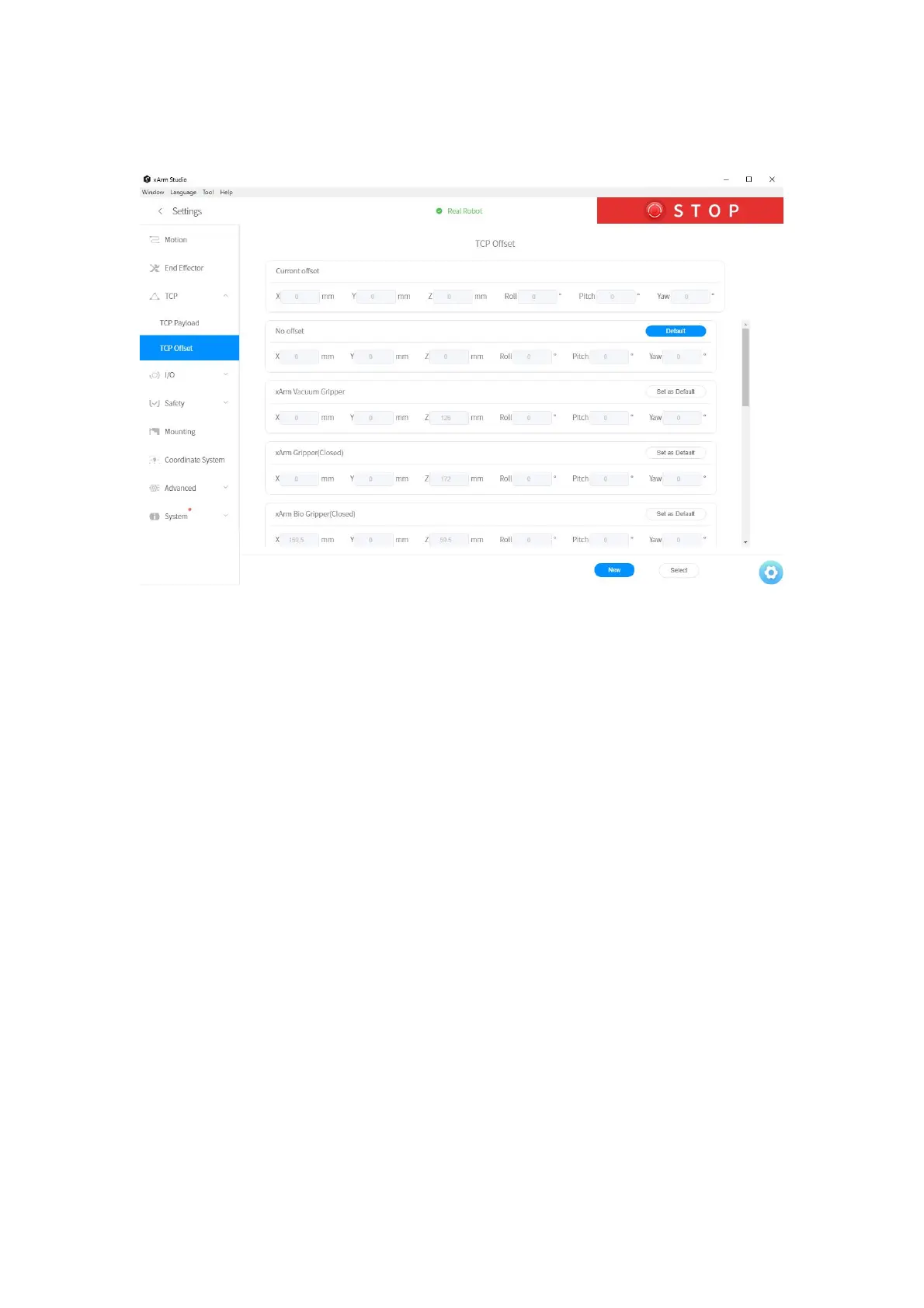
1.4.3.2 TCP Offset
On this page, the current offset of the robotic arm can be set and the additional TCP
offset data can be recorded. The additional TCP offset data can be referenced during
Blockly programming.
【Set as default】: Set the offset data to the offset of the current robotic arm and
display the current offset at the top.
【New】: Create a new offset record.
【Select】: Select the offset data to be deleted in the next step.
【Delete】: Delete the selected offset data.
Note: the current default offset data cannot be deleted.
【Save】: Save for the newly added offset record, setting the default offset, and
deleting the offset record.
【Cancel】: Cancel saving the newly added offset record, setting the default offset,
and deleting the offset record.