97
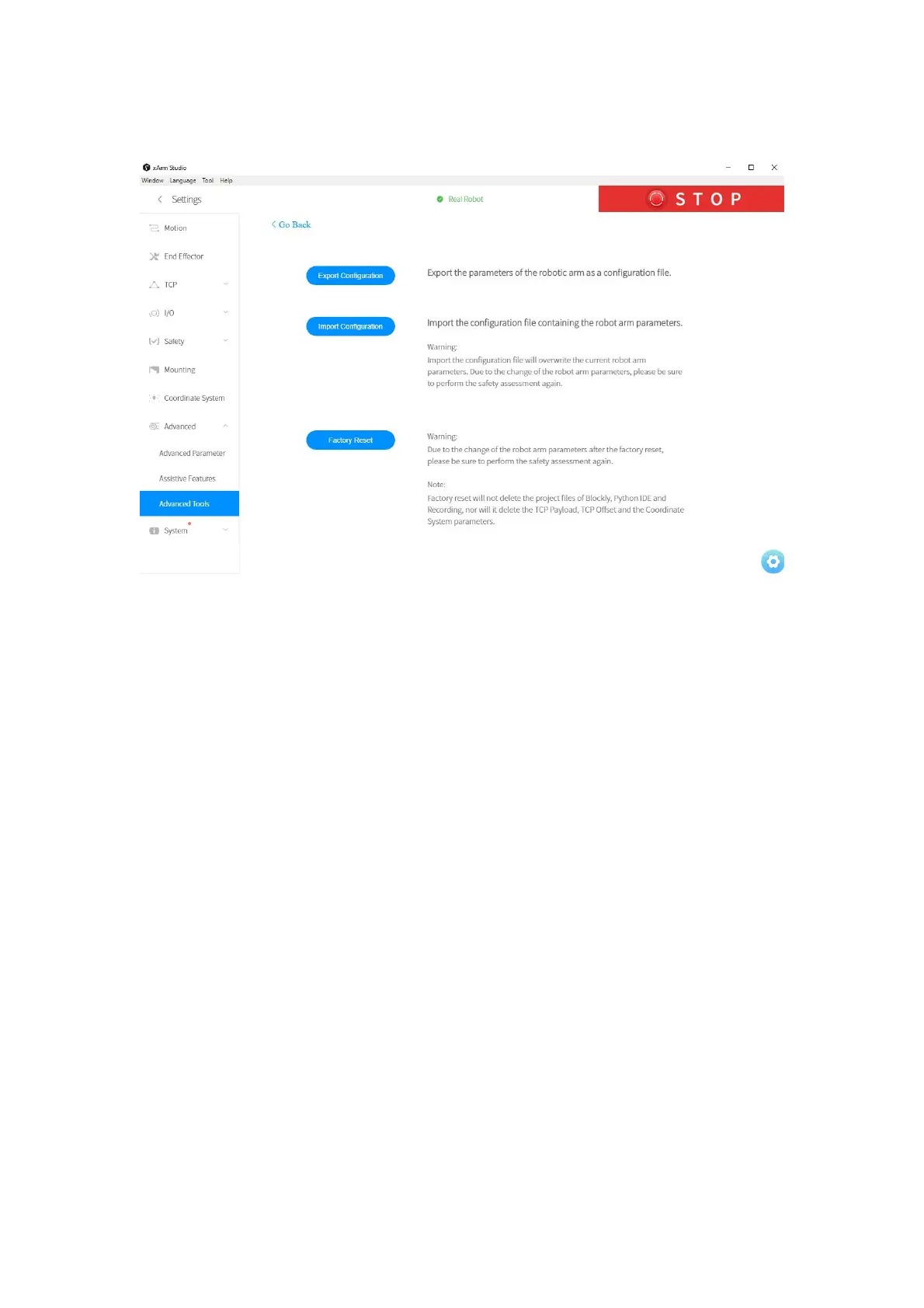
Configuration File
1. Click the 【Export Configuration】button to export the parameters of the robotic
arm as a configuration file.
The robotic arm parameters that can be exported mainly include: motion parameters,
TCP offset, TCP payload, IO settings, safety boundary, installation methods,
coordinate systems, and advanced parameters.
2. Click the 【 Import Configuration 】 button to import the configuration file
containing the parameters of the robotic arm.
3. Click the 【 Factory Reset 】 button, and the robotic arm will restore the factory
settings mode.
Note:
(1) When multiple robotic arms need to share a set of configuration parameters, click
the 【Export Configuration】button to export the configuration file of a robotic arm
that has been set. Then click the 【 Import Configuration 】 button to import the