Adding, renaming, modifying and removing TCPs
Tap the New button to define a new TCP. The created TCP automatically receives a unique name
and becomes selectable in the drop-down menu. To rename a TCP, tap the Rename button. To
remove the selected TCP, tap the Remove button. The last TCP cannot be removed.
The translation and rotation of a selected TCP can be modified by entering new values into the
fields.
Active TCP
When moving linearly, the robot always uses the active TCP to determine the TCP offset. The
active TCP can be changed using a Move command (see1.24.4. Command: Moveon page161)
or a Set command.
Default TCP
The Default TCP must be set as the active TCP before running a program. Select the desired
TCP and tap Set as default to set a TCP as the default. The green icon in the available drop-down
menu indicates the default configured TCP.
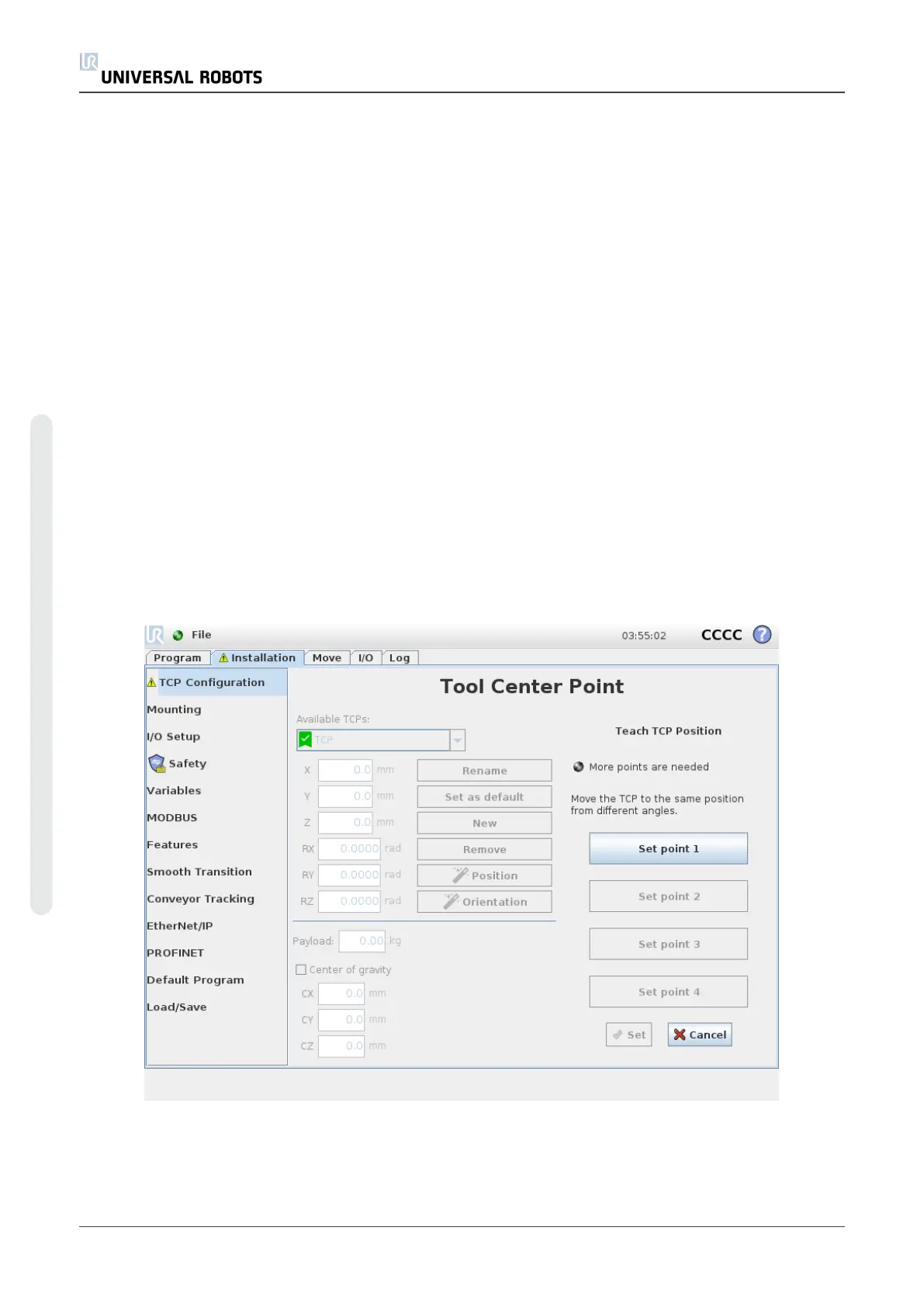
Teaching TCP position
TCP position coordinates can be calculated automatically as follows:
UR10 128 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.