• The interface is automatically detected.
• The safety system of the robot reports that EUROMAP 67 is detected but not defined
in the robot Installation. Go to Installation, Safety, and Miscellaneous and check the
check-box Euromap67.
• Press the button Save and restart.
• The GUI restarts.
• Confirm the new safety settings.
• The EUROMAP 67 is now installed and ready to use.
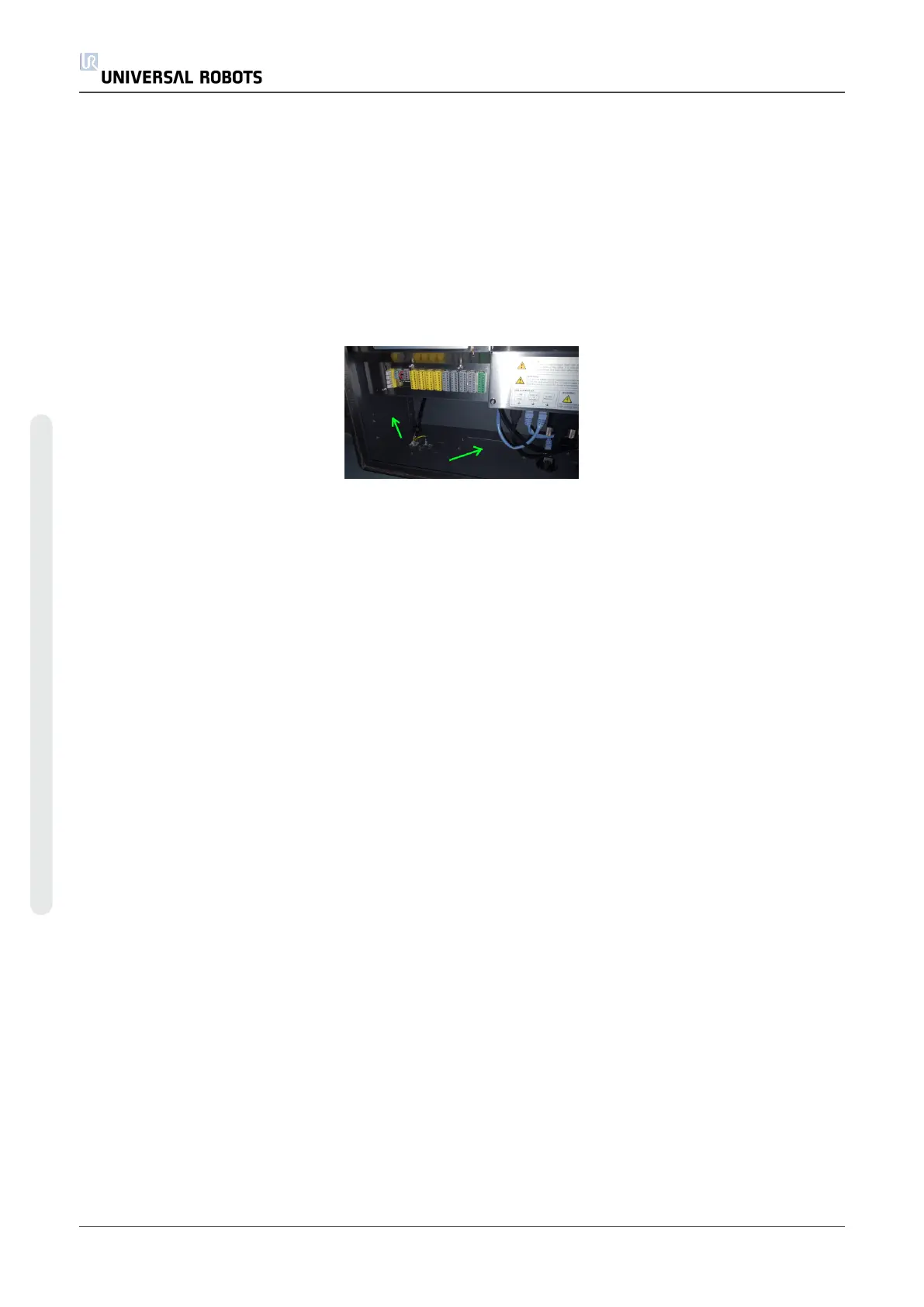
18.2:Interface placements in the controller box
1.29.2. Uninstalling
Follow the procedure below.
1. Power down the controller box.
• The green light of the power button of the teach pendant must be off.
2. Unmount the interface.
• Remove the ribbon cable.
• Remove the M6 nut from the ground connector.
• Remove all M4 screws from the outer side of the controller box.
3. Power up the controller box.
• The safety system of the robot reports that EUROMAP 67 is defined in the robot
Installation but not detected in the system. Go to Installation, Safety and
Miscellaneous and un-check the check-box Euromap67.
• Press the button Save and restart.
• The GUI restarts.
• Confirm the new safety settings.
• The EUROMAP 67 is now uninstalled.
1.30. Electrical characteristics
The following subsections contain useful information for machine builders and debuggers.
UR10 232 User Manual
EUROMAP 67 Interface
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.