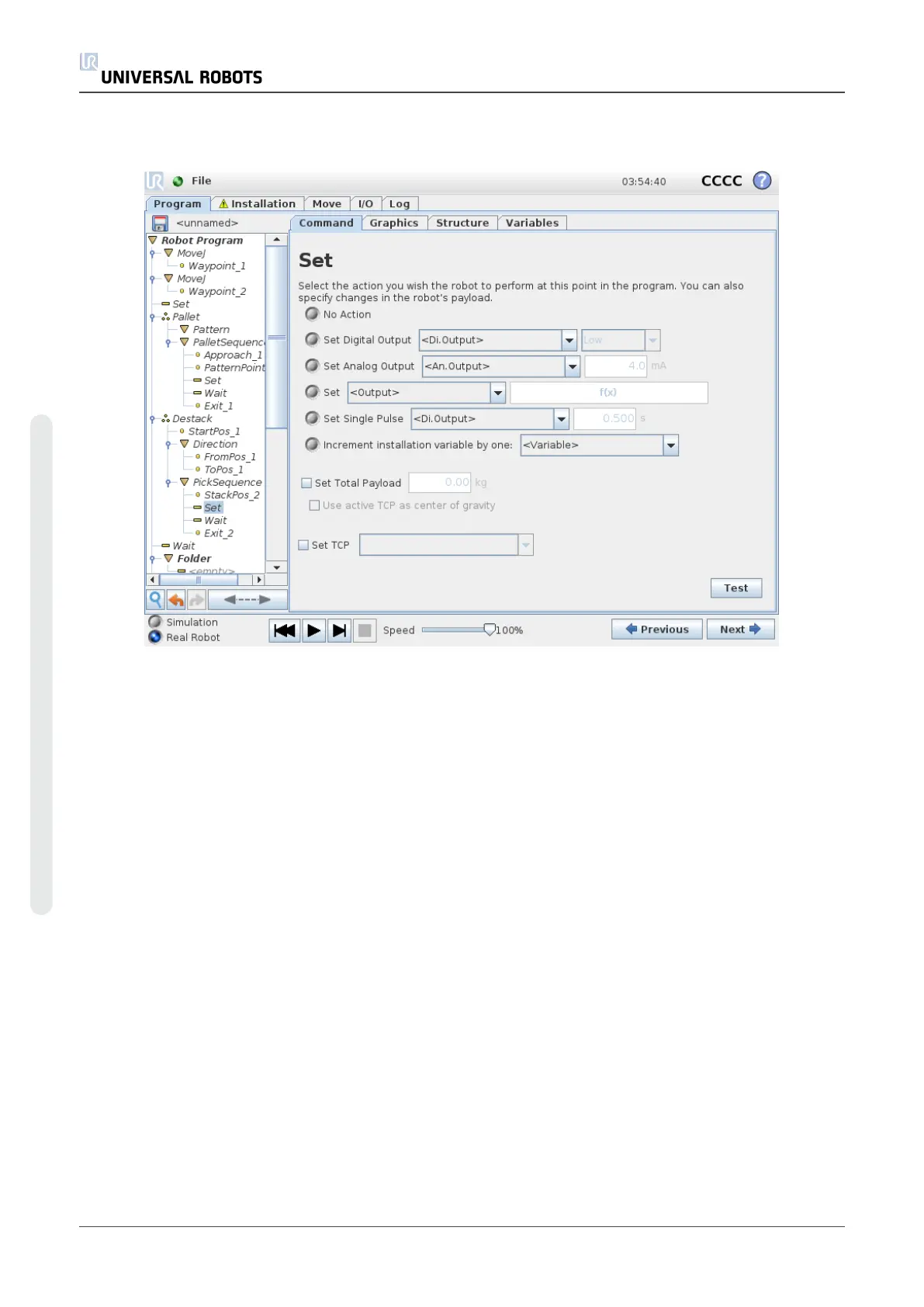
1.24.11. Command: Set
Sets either digital or analog outputs to a given value. Digital outputs can also be set to send a
single pulse.
Use the Set command to set the payload of the Robot Arm. You can adjust the payload weight to
prevent the robot from triggering a protective stop, when the weight at the tool differs from the
expected payload. If the active TCP should not be used as the center of gravity the checkbox
must be unchecked.
The active TCP can also be modified using a Set command, by selecting the check box and
choosing one of the TCP offsets from the menu.
If the active TCP for a particular motion is known at the time of writing of the program, consider
using the TCP selection on the Move card instead (see1.24.4. Command: Moveon page161).
For further information about configuring named TCPs (see1.23.6. Installation → TCP
Configurationon page127).
UR10 176 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.