Installation variables
These can be used by multiple programs and their names and values are persisted together
with the robot installation (see1.23.10. Installation → Variableson page134). Installation
variables keep their value after the robot and control box has been rebooted.
Regular program variables
These are available to the running program only and their values are lost as soon as the
program is stopped.
Variable types
bool A boolean variable whose value is either True or False.
int A whole number in the range from − 2147483648 to 2147483647 (32 bit).
float A floating point number (decimal) (32 bit).
string A sequence of characters.
pose
A vector describing the location and orientation in Cartesian space. It is a combination
of a position vector (x, y, z) and a rotation vector (rx, ry, rz) representing the orientation,
written p[x, y, z, rx, ry, rz].
list A sequence of variables.
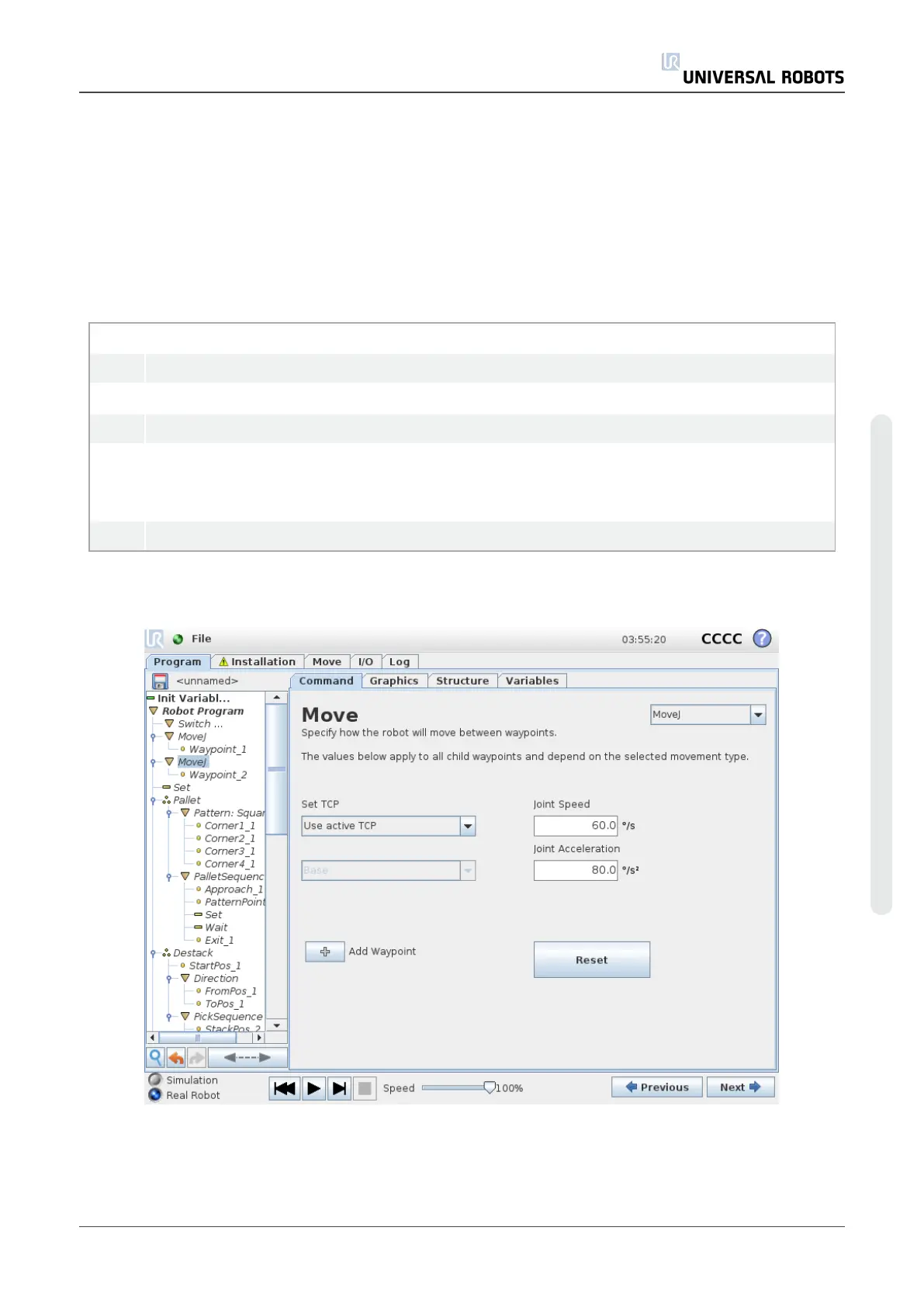
1.24.4. Command: Move
The Move command controls the robot motion through the underlying waypoints. Waypoints have
to be under a Move command. The Move command defines the acceleration and the speed at
which the robot arm will move between those waypoints.
User Manual 161 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.