If no errors exist and attempting to navigate away, a different dialog appears with the following
options:
1. Apply changes and restart the system. This will apply the safety configuration
modifications to the system and restart. Note: This does not imply that any changes have
been saved; shutdown of the robot at this point will lose all changes to the robot
installation including the Safety configuration.
2. Revert back to the previously applied safety configuration. This will disregard all changes
and allow you to continue to the desired selected destination.
1.20.4. Tolerances
The Robot Arm uses built-in tolerances that prevent safety violations. A safety tolerance is the
difference between a safety limit and a maximum operational value. For example, the general
speed tolerance is − 150mm/s. This means that if the user configures a 250mm/s speed limit,
then the maximum operational speed will be 250 − 150 = 100mm/s. Safety tolerances prevent
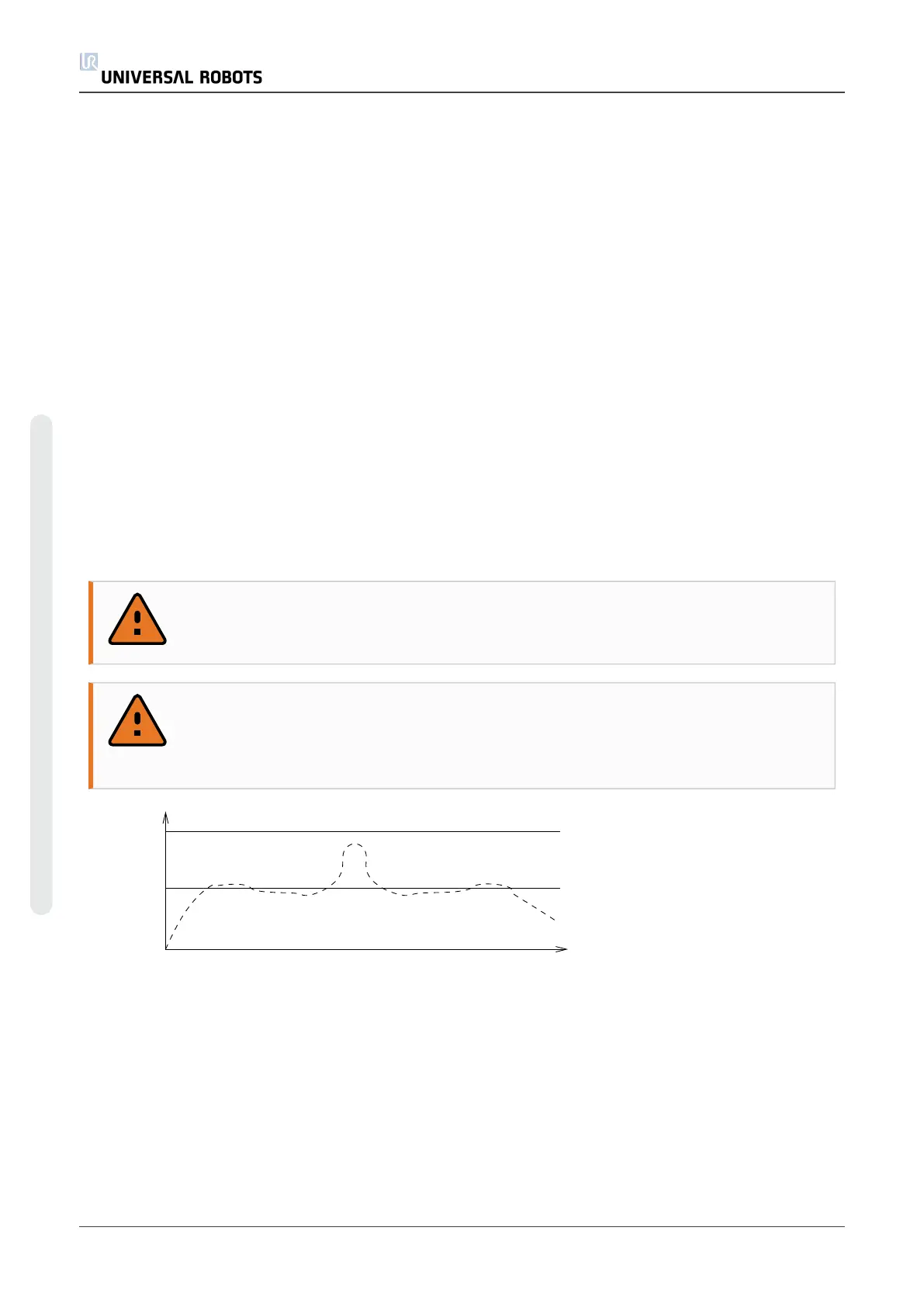
safety violations while allowing for fluctuations in program behavior. For example, when handling
a heavy payload, there may be situations where the Robot Arm needs to briefly operate above the
normal maximum operational speed to follow a programmed trajectory. An example of such a
situation is shown in figure 12.1.
WARNING
A risk assessment is always required using the limit values without tolerances.
WARNING
Tolerances are specific to the version of the software. Updating the software may
change the tolerances. Consult the release notes for changes between versions.
Time
Speed
Actual speed
Safety speed limit
Maximum operational speed
12.1:Safety tolerance example.
1.20.5. Safety Checksum
The text in the top right corner of the screen gives a shorthand representation of the safety
configuration currently used by the robot. When the text changes, this indicates that the current
safety configuration has changed as well. Clicking on the checksum displays the details about
the currently active safety configuration.
UR10 90 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.