Payload
The weight of the robot’s tool is specified in the lower part of the screen. To change this setting,
simply tap the white text field and enter a new weight. The setting applies to all defined TCPs.
For details about the maximum allowed payload, see the Hardware Installation
Manual.
Center of gravity
The tool’s center of gravity is specified using the fields CX, CY and CZ. The settings apply to all
defined TCPs. Installations created before version 3.8 support the center of gravity being set to
the TCP if they were previously set. If the center of gravity is manually set, in 3.8 or higher, the
ability to set the center of gravity for the TCP is permanently removed.
WARNING
Use the correct installation settings. Save and load the installation files with the
program.
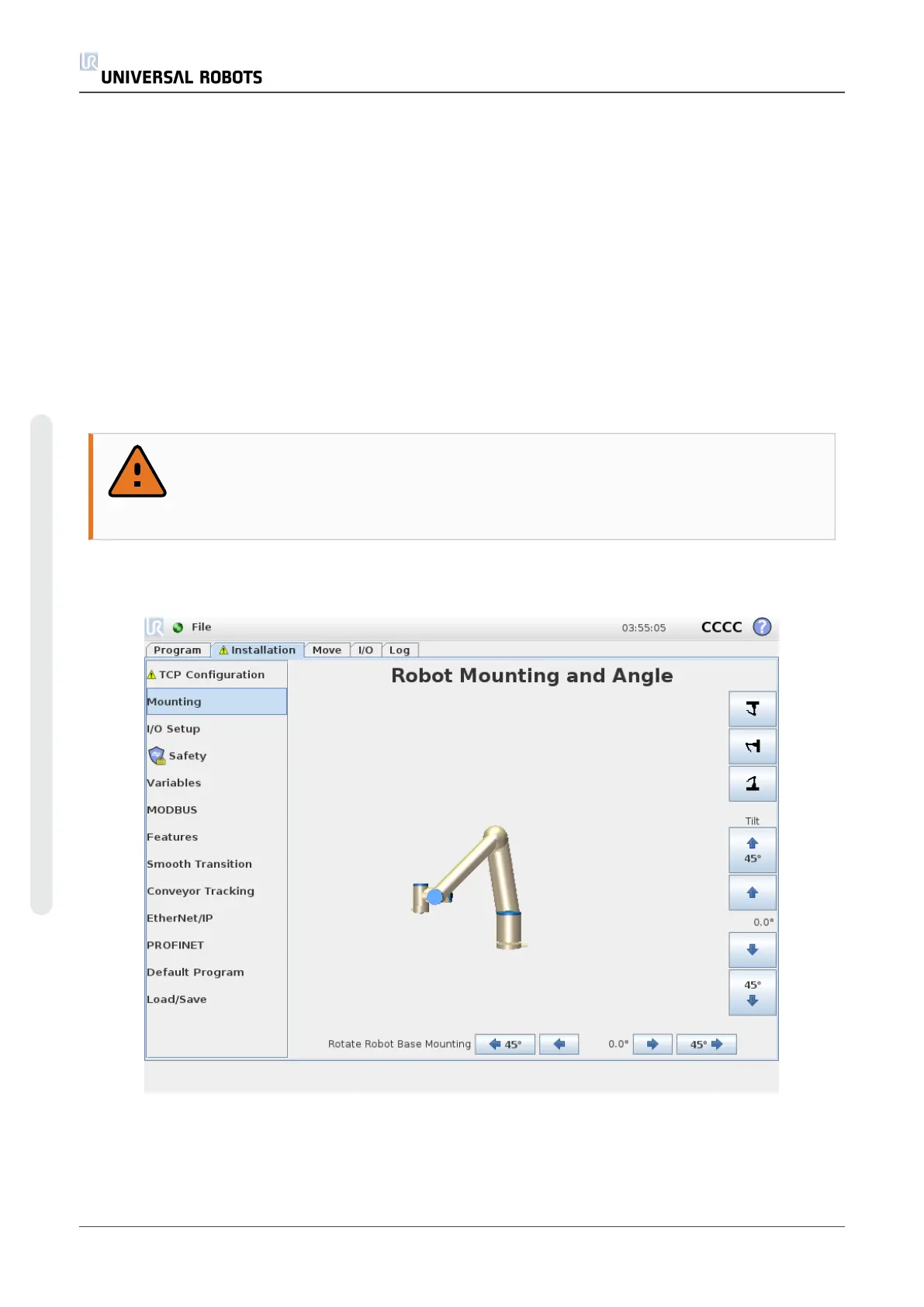
1.23.7. Installation → Mounting
Specifying the mounting of the Robot arm serves two purposes:
UR10 130 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.