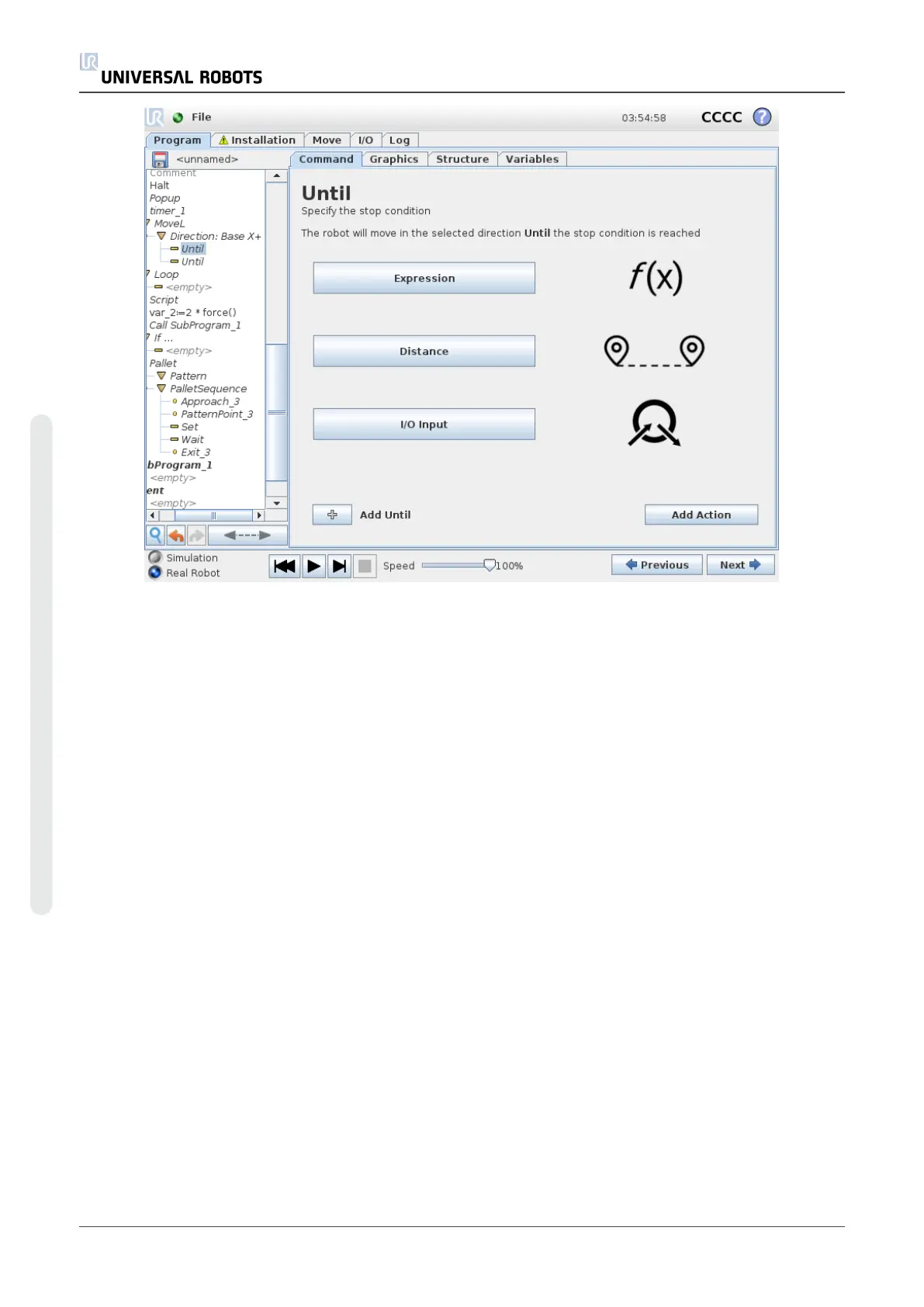
In the Until field, you can define the following stop criteria:
• Add Action Add program nodes if a specific until condition is met. For instance if an error
state is detected, the program can be stopped with a Popup node.
• Distance This node can be used to stop a Direction move when the robot has moved a
certain distance. The velocity is ramped down so the robot stops exactly at the distance.
• Expression This node can be used to stop the motion due to a custom program expression.
You can use I/Os, variables or script functions to specify the stop condition.
• I/O Input You can use this node to stop a signal controlled motion on an I/O Input.
UR10 174 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.