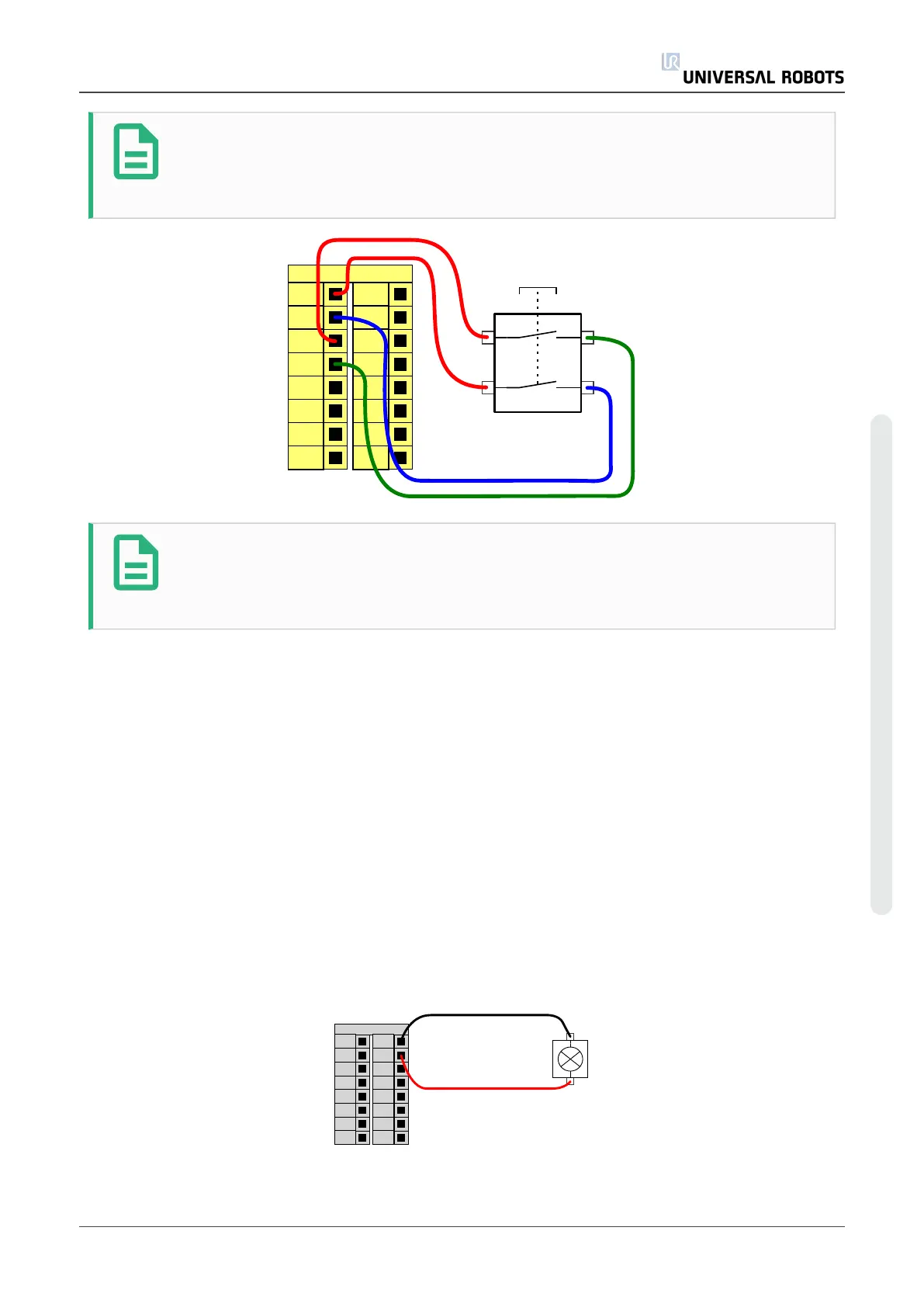
NOTE
The Universal Robots safety system does not support multiple Three-Position
Enabling Devices.
24V
CI1
24V
CI2
24V
CI3
24V
CI0
24V
CI5
24V
CI6
24V
CI7
24V
CI4
Configurable Inputs
3-Position Switch
NOTE
The two input channels for the Three-Position Enabling Device input have a
disagreement tolerance of 1 second.
General purpose digital I/O
This section describes the general purpose 24V I/O (Gray terminals) and the configurable I/O
(Yellow terminals with black text) when not configured as safety I/O. The common specifications
in sectionCommon specifications for all digital I/Oon page31 must be observed.
The general purpose I/O can be used to drive equipment like pneumatic relays directly or for
communication with other PLC systems. All digital outputs can be disabled automatically when
program execution is stopped, see more in partPart II PolyScope Manualon page85. In this
mode, the output is always low when a program is not running. Examples are shown in the
following subsections. These examples use regular digital outputs but any configurable outputs
could also have be used if they are not configured to perform a safety function.
Load controlled by a digital output
This example shows how to connect a load to be controlled from a digital output, see below.
0V
DO1
0V
DO2
0V
DO3
0V
DO0
Digital Outputs
0V
DO5
0V
DO6
0V
DO7
0V
DO4
LOAD
User Manual 37 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.