Chapter 5: Detailed description of parameters
143
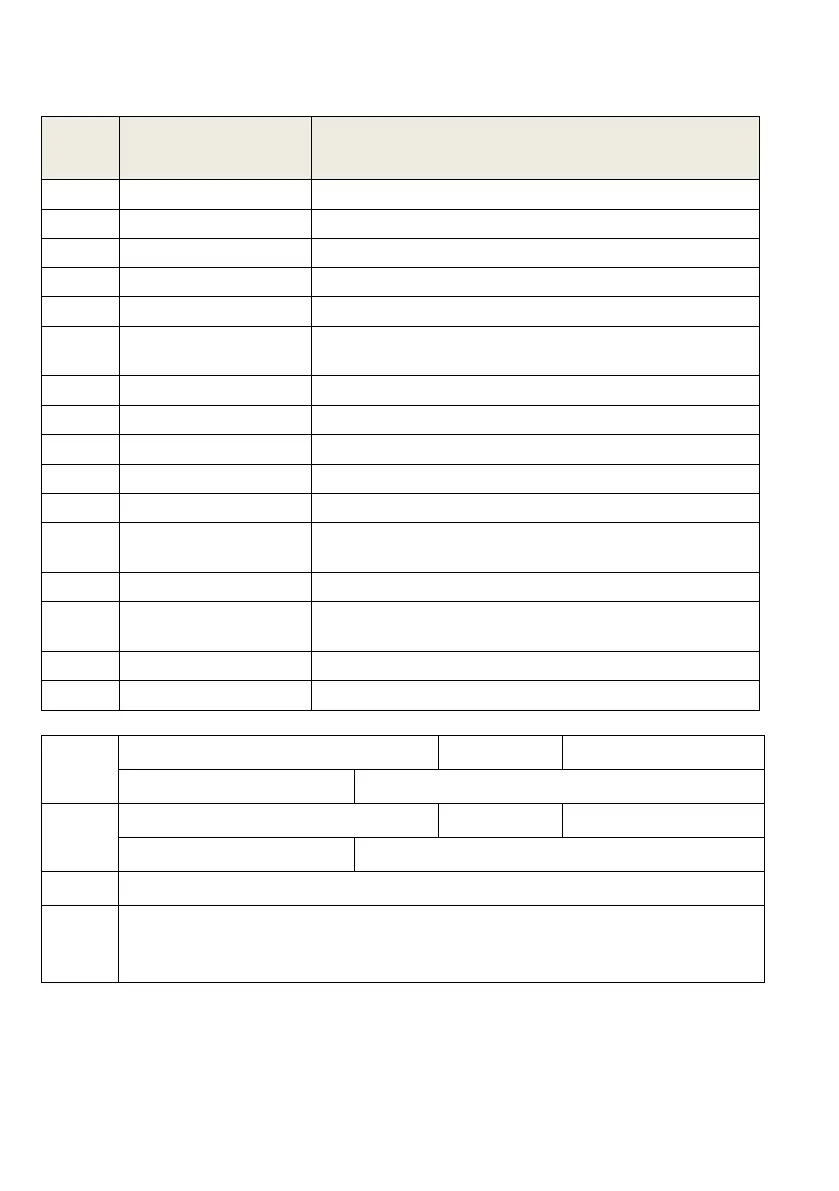
Table 4-6 Relationship between pulse and analog output ranges and corresponding
functions.
Range (corresponding to the range of pulses or
analog outputs 0.0%-100.0%)
0 - maximum output frequency
0 - maximum output frequency
0 - 2-multiple the rated value of current the motor
0 - 2-multiple the rated value of torque the motor
0 – 2-multiple of the rated value of supply voltage
0 – 1.2-multiple of the rated value of voltage the
inverter
0 V - 10 V (or 0 – 20 mA)
Numbered value of
counter
0 - maximum set value of the counter
0- the rotational speed corresponding to the
maximum output frequency
FOV zero offset coefficient
These function codes are used to correct the shift of the zero of the analogue output and
the output amplitude deviation. They can also be used to define the desired FOV curve.
If "b" represents a zero shift, "k" represents the gain, "Y" represents the actual output and
"X" represents the standard output, the actual output value is: Y = kX + b.