Network Communications
10
10.6 MEMOBUS/Modbus Communications
YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference 741
■ Bypass Control
To use external commands to set the frequency references and motor run/stop with serial communications, set these
parameters as specified by the application:
• b1-01 = 2 [Frequency Reference Selection 1 = Serial Communications]
• b1-02 = 2 or 8 [Run Command Selection 1 = Serial Communications or AUTO Command + Serial Run]
For more information about operation mode selection, refer to b1-01 and b1-02.
◆ Communications Timing
To prevent overrun of the slave side, the master cannot send a message to the same drive for a selected length of time.
To prevent overrun of the master side, the slave cannot send a response message to the master for a selected length of
time.
This section gives information about message timing.
■ Command Message from Master to Slave
To prevent data loss and overrun, after the master receives a message from the slave, the master cannot send the same
type of command message to the same slave for a selected length of time. The minimum wait time is different for
each type of message. Refer to Table 10.20 to find the minimum wait times.
Table 10.20 Minimum Wait Time to Send a Message
Command Type Example Minimum Wait Time
1
• Operation commands (Run command, stop command)
• I/O settings
• Reading the motor and parameter setting values
5 ms
*1
2 Writing a parameter
H5-11 = 0: 50 ms
H5-11 = 1: 200 ms
*1
3 Writing of modified data with the Enter command
200 ms to 2 s, depending on the number of
parameters that were changed
*1
4 Enter with storage to drive EEPROM after initialization 5 s
*1 When the drive receives a message in the minimum wait time, it does command type 1 and sends a response message. If the drive
receives command type 2 or command type 3 messages in the minimum wait time, it will trigger a communications error or the drive will
ignore the command.
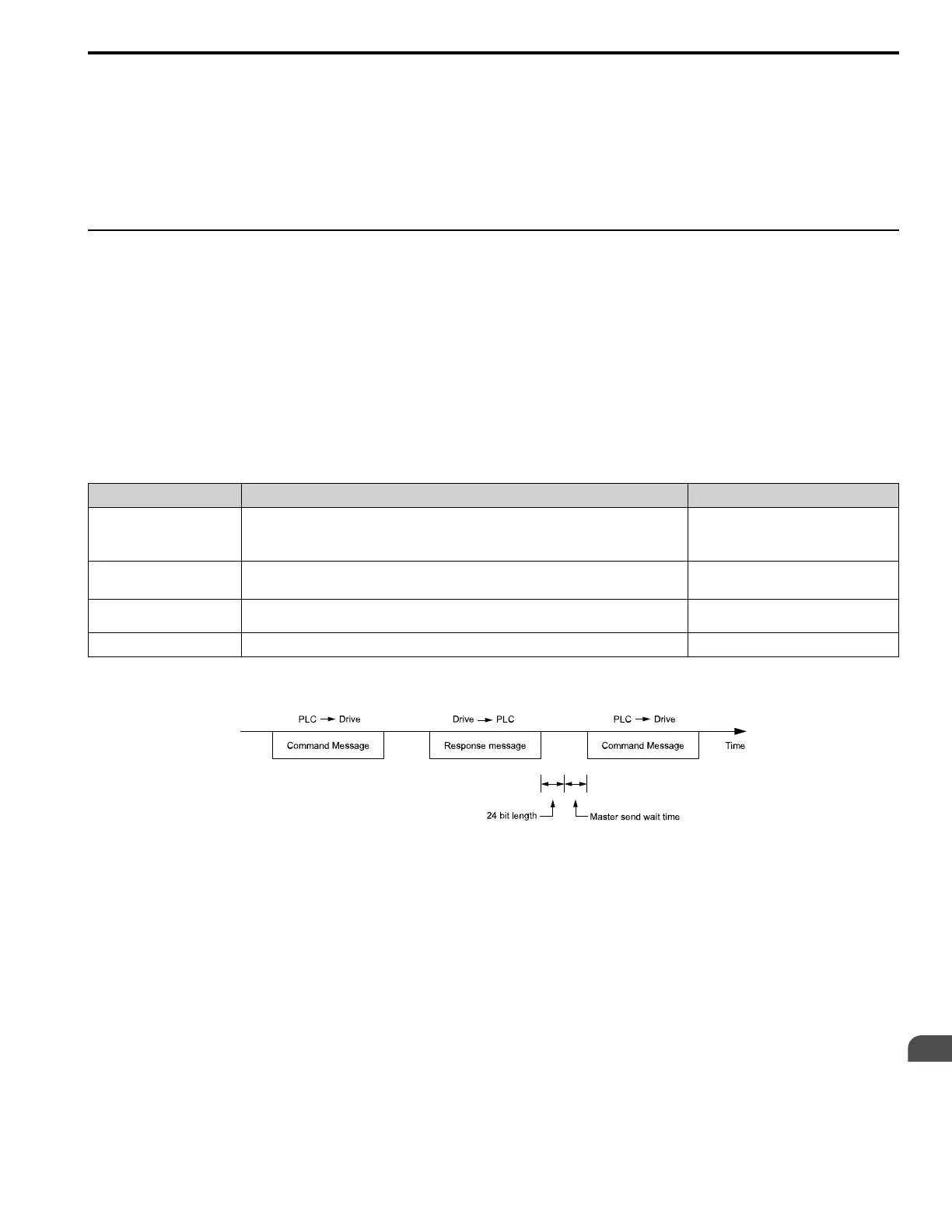
Figure 10.21 Minimum Wait Time to Send a Message
You must set the timer in the master to measure the length of time for the slave to respond to the master. If you set the
timer, but the slave does not send a response message in a specified length of time, the master will send the message
again.
■ Response Message from Slave
The slave receives the command message from the master then processes the data it received. The slave then waits for
the time set in H5-06 [Drive Transmit Wait Time] then sends a response message to the master. If overrun occurs on
the master, increase the wait time set in H5-06.