Actual signals and parameters
Parameters in the Long parameter mode
Digital input DI3: Reference increase. Digital input DI4: Reference decrease.
Stop command resets the reference to zero. When this selection becomes
active (in change from EXT1 to EXT2), the reference initializes to the value
used when this control location (and this selection) was active the last time.
Digital input DI3: Reference increase. Digital input DI4: Reference decrease.
The program stores the active reference (not reset by a stop command).
When this selection becomes active (in change from EXT1 to EXT2), the
reference initializes to the value used when this control location (and this
selection) was active the last time.
Reference is calculated with the following equation:
REF = AI1(%) + POT(%) - 50%
Reference is calculated with the following equation:
REF = AI(%) · (POT(%) / 50%)
Reference is calculated with the following equation:
REF = AI1(%) + 50% - POT(%)
Reference is calculated with the following equation:
REF = AI1(%) · (50% / POT (%))
A constant value defined by parameter 4011 INTERNAL SETPNT
See selection DI3U,4D(NC).
Selects a constant value as process PID controller reference, when
parameter 4010 SET POINT SEL value is set to 19 (INTERNAL).
Unit and range depend on the unit and scale defined by parameters 4006
UNITS and 4007 UNIT SCALE.
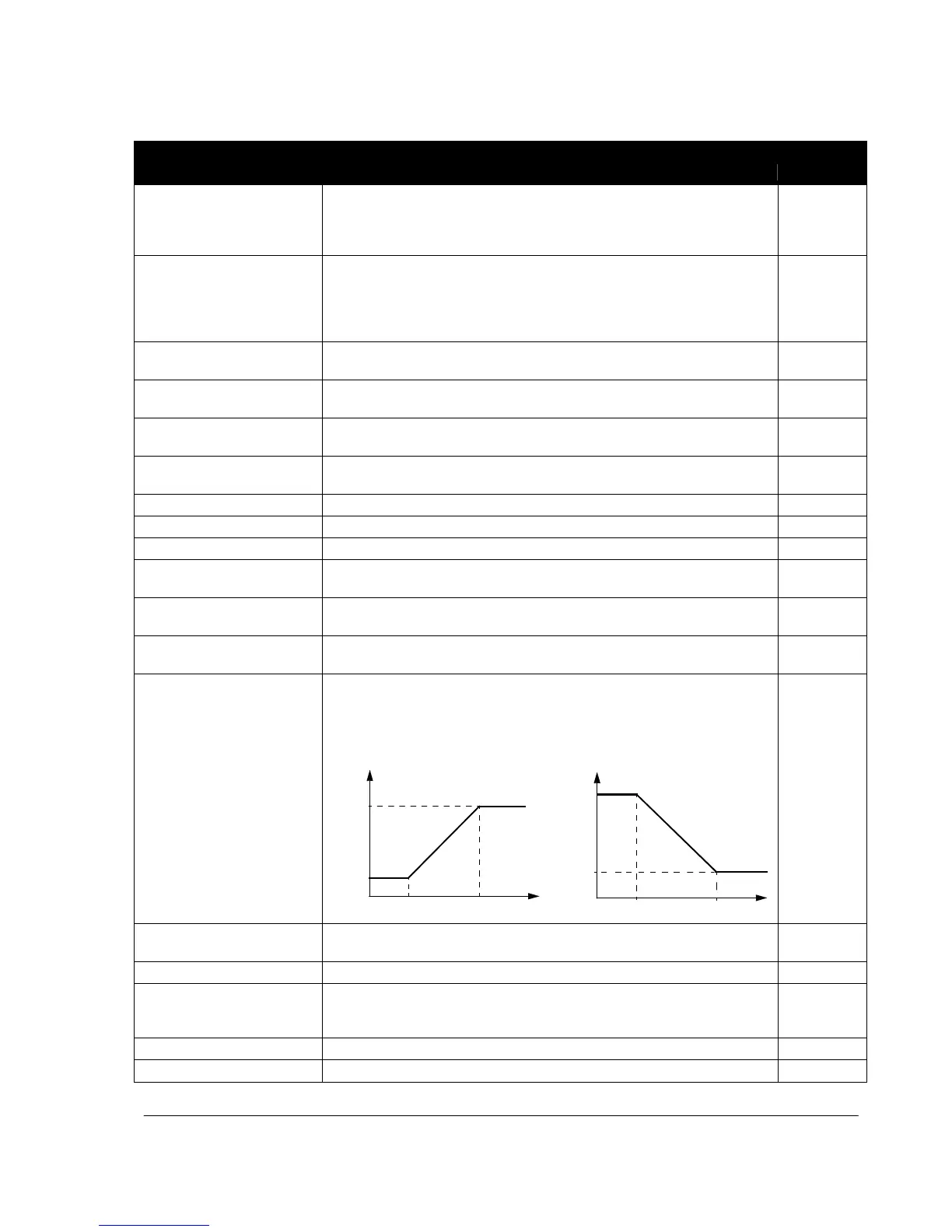
Defines the minimum value for the selected PID reference signal source. See
parameter 4010 SET POINT SEL.
Value in percent.
Example: Analog input AI1 is selected as the PID reference source (value of
parameter 4010 SET POINT SEL is 1 = AI1). The reference minimum and
maximum correspond to the 1301 MINIMUM AI1 and 1302 MAXIMUM AI1
settings as follows:
Ref
MAX > MIN
4012
Ref
MIN >
MAX
4013 (MIN)
(MAX)
4012
4013
(MIN)
AI1 (%)
(MAX)
AI1 (%)
1301
1302
1301
1302
Defines the maximum value for the selected PID reference signal source.
See parameters 4010 SET POINT SEL and 4012 SETPOINT MIN.
Selects the process actual value (feedback signal) for the process PID
controller: The sources for the variables ACT1 and ACT2 are further defined
by parameters 4016 ACT1 INPUT and 4017 ACT2 INPUT.
Subtraction of ACT1 and ACT 2

 Loading...
Loading...








