Configuration 379
Relevant parameters for this configuration:
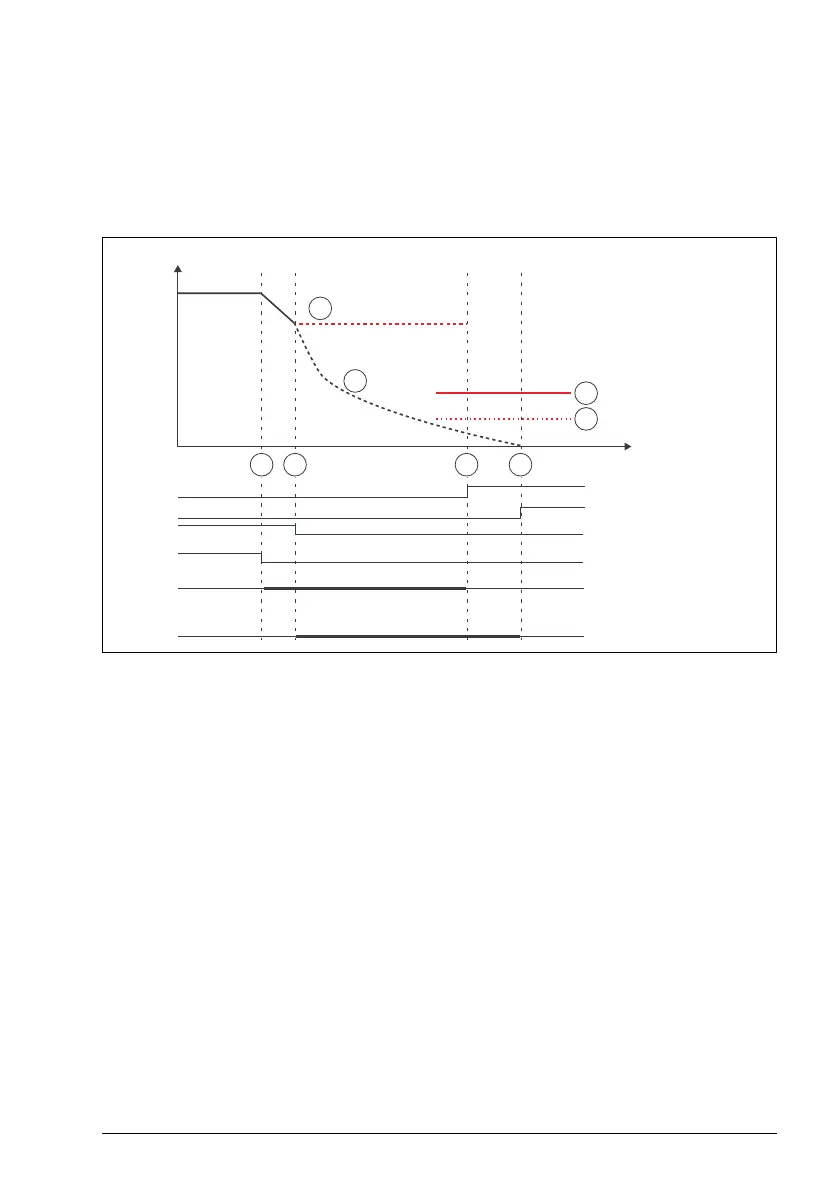
• Deceleration time (drive parameter 23.13 Deceleration time 1)
• SLS activation delay: 2000 ms (SLSx.04 SLS time delay = 2000 ms)
• STO.14 Time to zero speed with STO and modoff: 2500 ms.
1. SLS request is activated (SLSx.11 SLS1 input A = DI X113:2 & X114:2). SLS time
delay monitoring is started (SLSx.04 SLS time delay = 2000 ms). Deceleration to
SLS limit speed is started (drive parameter 23.13 Deceleration time 1).
2. Modulation is lost. Motor starts to coast to a stop. FSO stores last valid safe
speed estimation value. SLS time monitoring limit is kept active also when
modulation is lost (SLSx.04 SLS time delay = 2000 ms).
3. Last valid speed estimation value is higher than SLS trip limit speed when SLS
time monitoring limit has elapsed (SLSx.04 SLS time delay = 2000 ms). STO
indication goes on (STO.21 STO output = DO X113:7); see chapter How to
configure STO on page 331.
4. STO.14 delay starts when drive modulation is lost. If modulation does not return,
SLS indication goes on after STO.14 delay has elapsed.
When drive modulation is lost, last valid speed estimate is stored to FSO module until
modulation comes back or monitoring limit is reached. Time monitoring is kept active
also when modulation is lost during SLS deceleration ramp. The time monitoring
begins when SLS is requested. A time monitoring hit due to lost modulation is
generated when SLS time delay has elapsed. SLS hit is indicated and STO is
activated. Drive restart is not possible until STO.14 delay has elapsed.
SLS indication
Motor speed
Time
1 3 42
B
E
STO active
Drive modulation
SLS request
SLSx.04 time
delay monitoring
C
D
STO.14 delay
SLSx.04