Safety functions 69
With an encoder
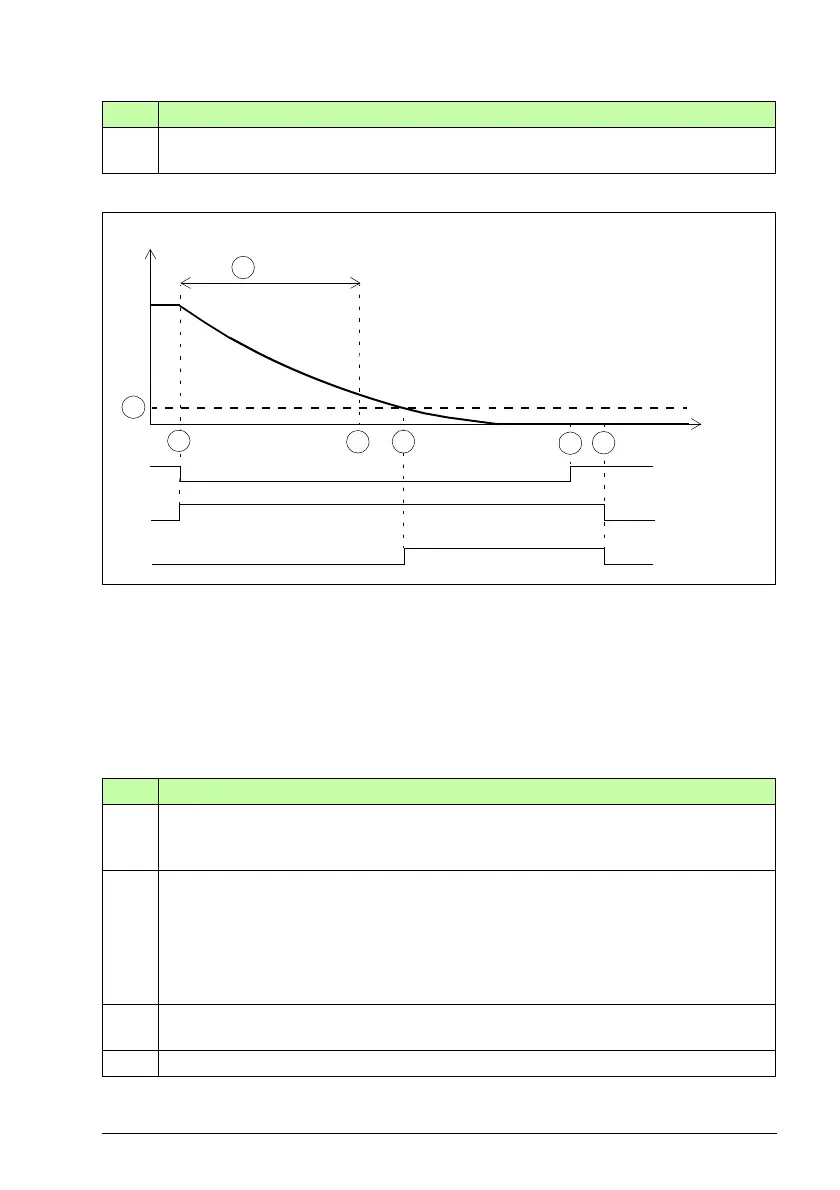
5 After the acknowledgement, the STO function is deactivated. The indications STO
output (STO.21) and STO completed output (STO.22) go off.
A Zero speed with encoder (parameter FSOGEN.52): Speed limit at which the motor has
stopped, the safety function is completed and the STO completed indication (parameter
STO.22) goes on.
B Restart delay after STO (parameter STO.13): Time from the STO activation to the
moment when the acknowledgment becomes allowed. With this parameter, you can
allow a restart of the drive before the motor has stopped (fly-start). You can use this
feature only in certain applications. This parameter is relevant only when an external
request activates the STO function.
Step Description
1 The STO request is received (for example, from the I/O). The FSO activates the drive
STO function and starts a counter for time B. STO active indication parameter STO
output (STO.21) goes on.
2 After time B has elapsed, the acknowledgement becomes allowed as soon as the
STO request has been removed (step 4).
Note: The acknowledgement becomes allowed already at the zero speed limit (A) if it
is reached before time B has elapsed.
Note: If an SSE or SS1 request is received while the STO function is active, the STO
function must be completed before the acknowledgement is allowed.
3 The motor speed reaches the zero speed limit (A), the FSO module defines the motor
as stopped and the STO completed indication goes on.
4 The STO request is removed.
Step Description
Drive STO state
& indication
4
STO request
Motor speed
Time
5
3
STO completed
indication
1
B
2
STO.13
A