76 Safety functions
With an encoder
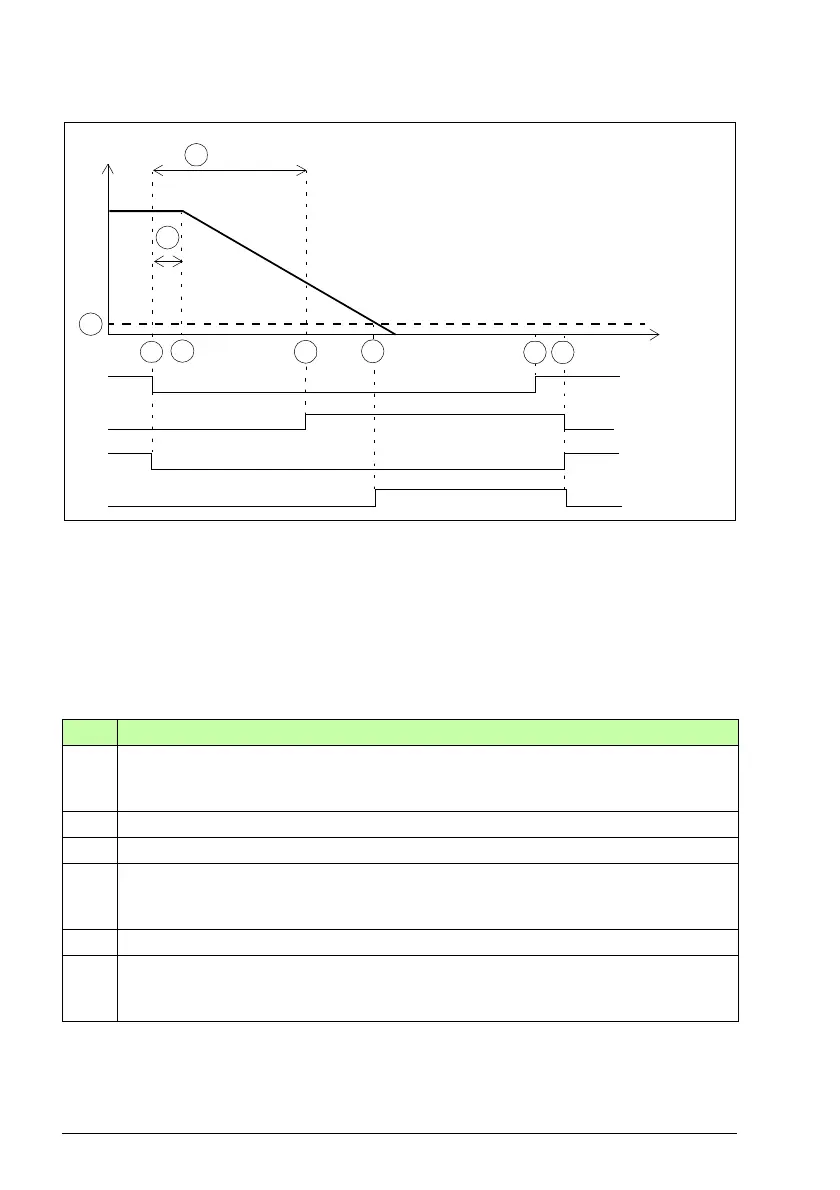
A Zero speed with encoder (parameter FSOGEN.52): Speed limit at which the motor has
stopped, the safety function is completed and the STO completed indication (parameter
STO.22) goes on. The acknowledgment becomes allowed.
B SBC delay (parameter SBC.12): Time from the activation of the drive STO to the moment
when the FSO activates the SBC function (brake).
In this case the value is negative and
the FSO activates the SBC before the drive STO. If the value is zero, the FSO activates
the SBC and drive STO functions at the same time.
C Response time (depends on system configuration, see page 532)
Step Description
1 The STO request is received (for example, from the I/O). The FSO activates the SBC
function (brake) and starts a counter for time B. STO active indication parameter STO
output (STO.21) goes on.
2 After time C has elapsed, the SBC starts to brake the motor.
3 After time B has elapsed, the FSO activates the drive STO.
4 The motor speed reaches the zero speed limit (A), the FSO module defines the motor
as stopped and the STO completed indication goes on. The acknowledgement
becomes allowed as soon as the STO request has been removed (step 5).
5 The STO request is removed.
6 After the acknowledgement, the STO and SBC functions are deactivated, and the
control is given back to the drive, which controls the brake from now on. The
indications STO output (STO.21) and STO completed output (STO.22) go off.
Drive STO state
& indication
STO request
Motor speed
Time
B
STO completed
indication
1
65
SBC output
3
4
SBC.12
A
C
2