NoteArt.no.Equipment, etc
These procedures include
references to the tools re-
quired.
Other tools and procedures may
be required. See references to
these procedures in the step-by-
step instructions below.
See chapter Circuit dia-
grams on page 391.
Circuit diagram
Removing cable harness, upper end (incl. axis 6)
Use this procedure to remove the cable harness, upper arm (incl. axis 6).
NoteAction
This is done in order to facilitate updating
of the revolution counter.
Move the robot to the calibration position.1
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
2
Detailed in section Replacing cable har-
ness, lower end (axes 1-3) on page 147.
If the complete cable harness is being re-
placed, start removal by removing the cable
harness, lower end.
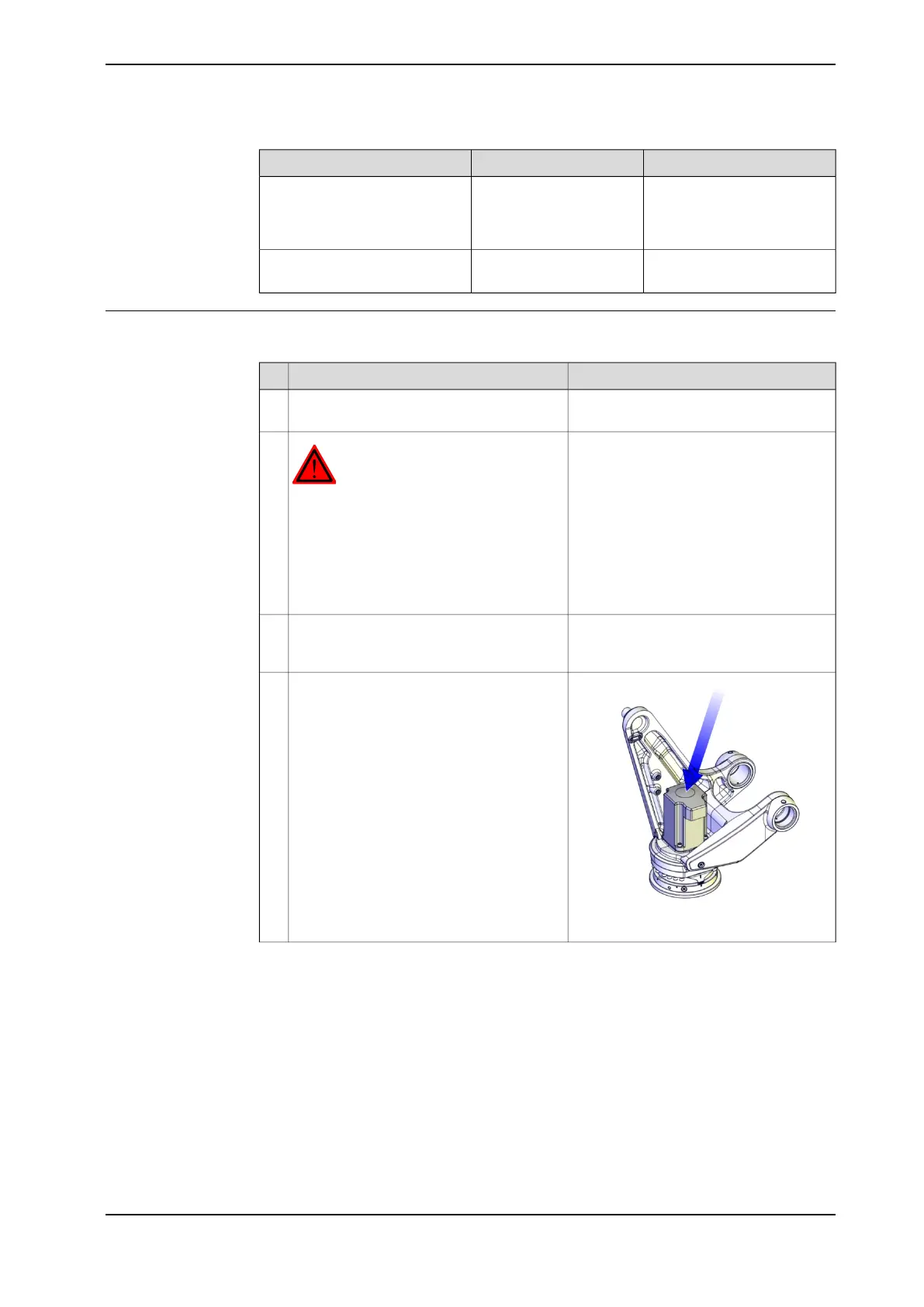
3
xx1000001106
Remove the axis 6 motor cover by removing
its attachment screws, in order to reach the
connectors.
4
Continues on next page
Product manual - IRB 460 159
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
4 Repair
4.3.2 Replacing the cable harness, upper end (incl. axis 6)
Continued

 Loading...
Loading...






