NoteAction
xx1000001302
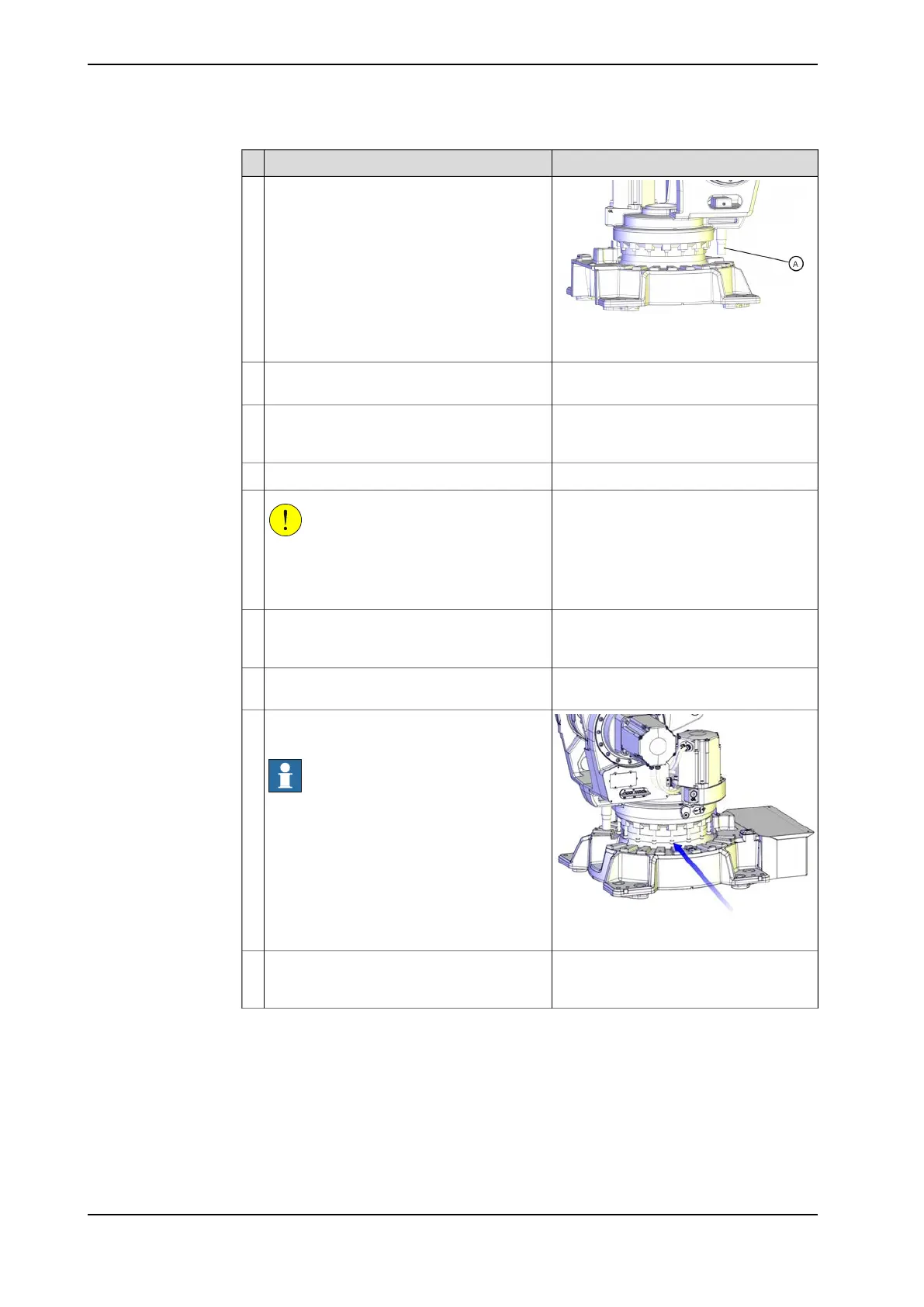
Remove the mechanical stop pin from the
frame.
5
• A: Mechanical stop pin
See Changing oil, axis-1 gearbox on
page 122.
Drain the axis 1 gearbox.6
See Replacing cable harness, lower end
(axes 1-3) on page 147.
Loosen the cable connectors from the base
and pull up the cabling from the base,
through the hole in the center of the frame.
7
See Replacing motor, axis 1 on page 285.Remove the axis 1 motor.8
CAUTION
The robot arm system weighs 750 kg.
All lifting accessories used must be sized
accordingly!
9
Fit the roundslings as described in Fitting the
lifting accessories to the complete arm sys-
tem on page 178.
10
Adjust the length of each roundsling so
that the lift is done completely level.
Stretch the roundslings so that they secure
the weight of the arm system.
11
xx1100000247
Unfasten the arm system from the base by
unscrewing the attachment screws.
Note
Use a bits holder with a thin head to remove
the screws. For example Stahlwille 736/40
D10 or similar. The space is cramp.
12
Article number is specified in Required
equipment on page 174.
Fit two guide pins in the holes. This will facil-
itate the removal of the complete arm system
and prevent damage on the gearbox.
13
Continues on next page
176 Product manual - IRB 460
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
4 Repair
4.3.5 Replacing the base, including axis 1 gearbox
Continued

 Loading...
Loading...






