518 Rockwell Automation Publication 1756-RM003N-EN-P - October 2011
Chapter 13 Special Instructions (FBC, DDT, DTR, PID)
Specify Scaling
Select the Scaling tab. You must click OK or Apply for any changes to
take effect.
Use PID Instructions
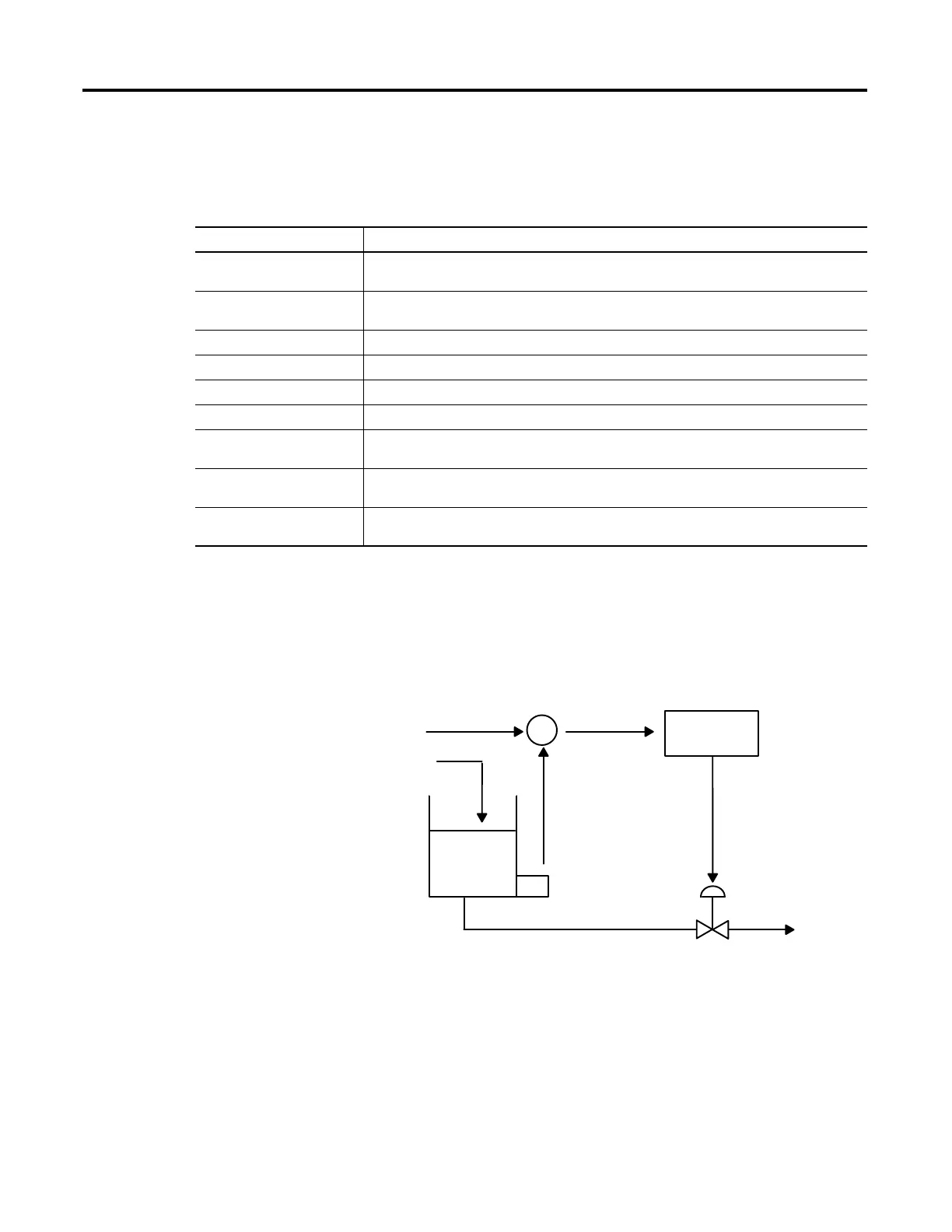
PID closed-loop control holds a process variable at a desired set point. The
illustration shows an example of a flow-rate/fluid level.
In the above example, the level in the tank is compared against the setpoint. If
the level is higher than the setpoint, the PID equation increases the control
variable and causes the outlet valve from the tank to open; thereby decreasing
the level in the tank.
The PID equation used in the PID instruction is a positional form equation
with the option of using either independent gains or dependent gains. When
using independent gains, the proportional, integral, and derivative gains affect
only their specific proportional, integral, or derivative terms respectively.
In this field Specify
PV unscaled maximum Enter a maximum PV value (.MAXI) that equals the maximum unscaled value received from the
analog input channel for the PV value.
PV unscaled minimum Enter a minimum PV value (.MINI) that equals the minimum unscaled value received from the
analog input channel for the PV value.
PV engineering units maximum Enter the maximum engineering units corresponding to .MAXI (.MAXS)
(1)
PV engineering units minimum Enter the minimum engineering units corresponding to .MINI (.MINS)
(1)
CV maximum Enter a maximum CV value corresponding to 100% (.MAXCV).
CV minimum Enter a minimum CV value corresponding to 0% (.MINCV).
Tieback maximum Enter a maximum tieback value (.MAXTIE) that equals the maximum unscaled value received from
the analog input channel for the tieback value.
Tieback minimum Enter a minimum tieback value (.MINTIE) that equals the minimum unscaled value received from
the analog input channel for the tieback value.
PID Initialized If you change scaling constants during Run mode, turn this off to reinitialize internal descaling
values (.INI).
(1) When using the ladder-based PID instruction, if you set MAXO = MINO, the PID instruction will reset these values
to default. MAXO = 100.0 and MINO = 0.0
14271
Setpoint
Flow Rate
Error
PID Equation
Control Variable
Process Variable
Level Detector

 Loading...
Loading...

