522 Rockwell Automation Publication 1756-RM003N-EN-P - October 2011
Chapter 13 Special Instructions (FBC, DDT, DTR, PID)
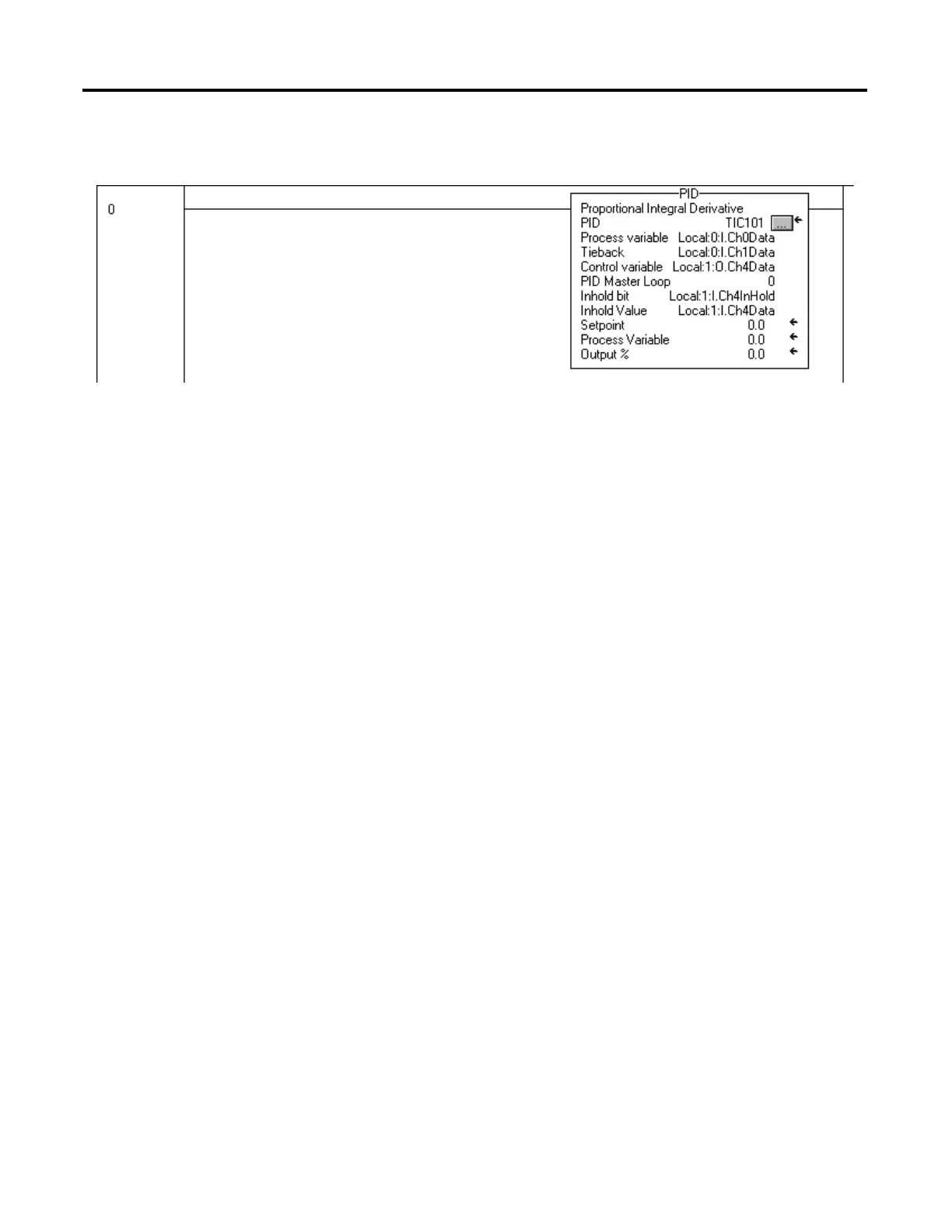
Relay Ladder
Structured Text
PID(TIC101,Local:0:I.Ch0Data,Local:0:I.Ch1Data,
Local:1:O.Ch4Data,0,Local:1:I.Ch4InHold,
Local:1:I.Ch4Data);
When using a periodic task, make sure that the analog input used for the
process variable is updated to the processor at a rate that is significantly faster
than the rate of the periodic task. Ideally, the process variable should be sent to
the processor at least five…10 times faster than the periodic task rate. This
minimizes the time difference between actual samples of the process variable
and execution of the PID loop. For example, if the PID loop is in a 250 ms
periodic task, use a loop update time of 250 ms (.UPD = .25), and configure
the analog input module to produce data at least about every 25…50 ms.
Another, somewhat less accurate, method of executing a PID instruction is to
place the instruction in a continuous task and use a timer done bit to trigger
execution of the PID instruction.

 Loading...
Loading...

