Rockwell Automation Publication 1756-RM003N-EN-P - October 2011 511
Special Instructions (FBC, DDT, DTR, PID) Chapter 13
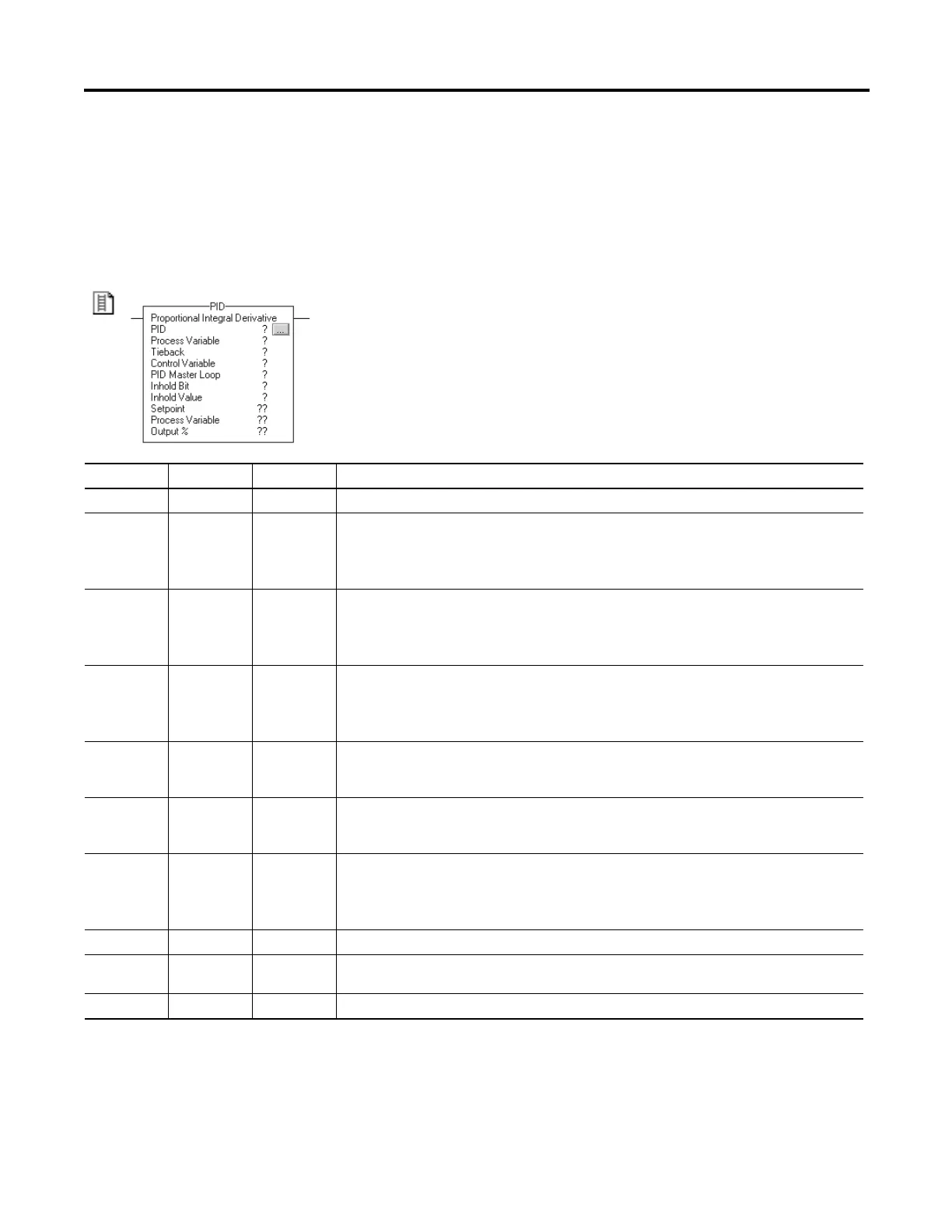
Proportional Integral
Derivative (PID)
The PID instruction controls a process variable such as flow, pressure,
temperature, or level.
Operands:
Relay Ladder
Operand Type Format Description
PID PID Structure PID structure
Process
variable
SINT
INT
DINT
REAL
Tag Value you want to control
Tieback SINT
INT
DINT
REAL
Immediate
Tag
(Optional) Output of a hardware hand/auto station that is bypassing the output of the controller
Enter 0 if you don’t want to use this parameter.
Control
variable
SINT
INT
DINT
REAL
Tag Value that goes to the final control device (valve, damper, and so forth)
If you are using the deadband, the Control variable must be REAL or it will be forced to 0 when the
error is within the deadband.
PID master
loop
PID Structure (Optional) PID tag for the master PID
If you are performing cascade control and this PID is a slave loop, enter the name of the master PID.
Enter 0 if you don’t want to use this parameter.
Inhold bit BOOL Tag (Optional) Current status of the inhold bit from a 1756 analog output channel to support bumpless
restart
Enter 0 if you don’t want to use this parameter.
Inhold value SINT
INT
DINT
REAL
Tag (Optional) Data readback value from a 1756 analog output channel to support bumpless restart
Enter 0 if you don’t want to use this parameter.
Setpoint Displays current value of the setpoint
Process
variable
Displays current value of the scaled Process Variable
Output % Displays current output percentage value

 Loading...
Loading...

