1 Operational Manual
05/02/03
196
4. Selecting Operational Description
4.1 The Control By Combined Injection Machine and Robotic Arm
4.1.1 Input Node Control of Injection Machine
A) Input 32- Confirmed signal of robot, when robot is used, the signal is “OFF”, otherwise,
the signal is “ON”.
B)
Input 33-Confirmed signal of product was gotten by robot in auto mode, when the
product is obtained, the signal is
“
ON
”
, otherwise, and the signal is
“
OFF
”
.
C)
Input 34-The robot can do ejector advance in auto mode while the signal is
“
ON
”
.
D)
Input 35
- Robot can control the mold’s closing of injection machine while the signal is
“ON”. If “OFF” appear then injection machine can’t close the mold and “064” warning
will appear.
4.1.2 Output Node Control of Injection Machine
A) OUT 85-In auto mode, when injection was finished, the signal is
“
ON
”
.
B) OUT 86-When open mold stops, the signal is
“
ON
”
.
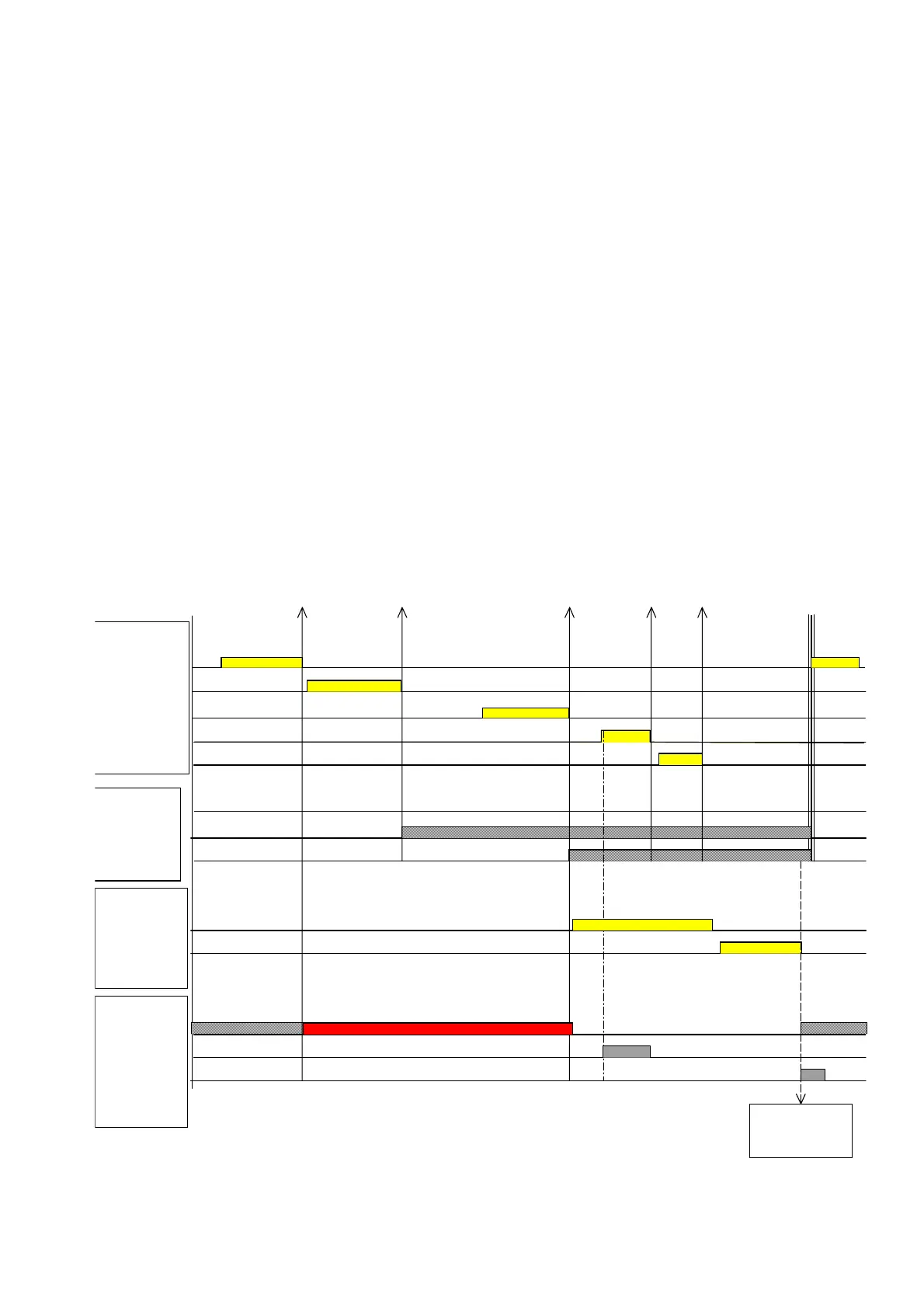
4.1.3 Operational Procedure
tion
-Closing
ion
-Opening
r Forwar
r Backward
End of Mold-Closing Injection finished End of Mold-Opening Ejector Ejector
Forward Backward
Finished Finished
Robot’s
Operation
Up
Down
Output
OUT85
OUT86
Robot’s
Output
Come Back
Ejector Out
Confirmation
Confirmation
of Product
4.1.4 Operational Descriptions:
When the robot was used (Machine signal is Input 32 OFF), whether the injection