Simga2N Traction Advanced Manual– V1.3 Page 48 (166) ©2021 DMC GmbH Herten Germany
End of Braking parameters examples of different situations
Situation 1: “M2-1 Control Mode “Spd/Torq””= 0 (Speed control mode) and “M1.5-1 Hill hold enable
”Off/HH/S””=0 (No Hill Hold)
In this case the controller acts to control the speed and no hill hold is selected, thus the parameters “M1.5-2 Hill hold
time ”HHTime””, “M1.5-3 Restraint hill hold speed ”HHspeed”” and “M1.5-4 Restraint hill hold torque threshold
”HHTrqTH”” won’t be active.
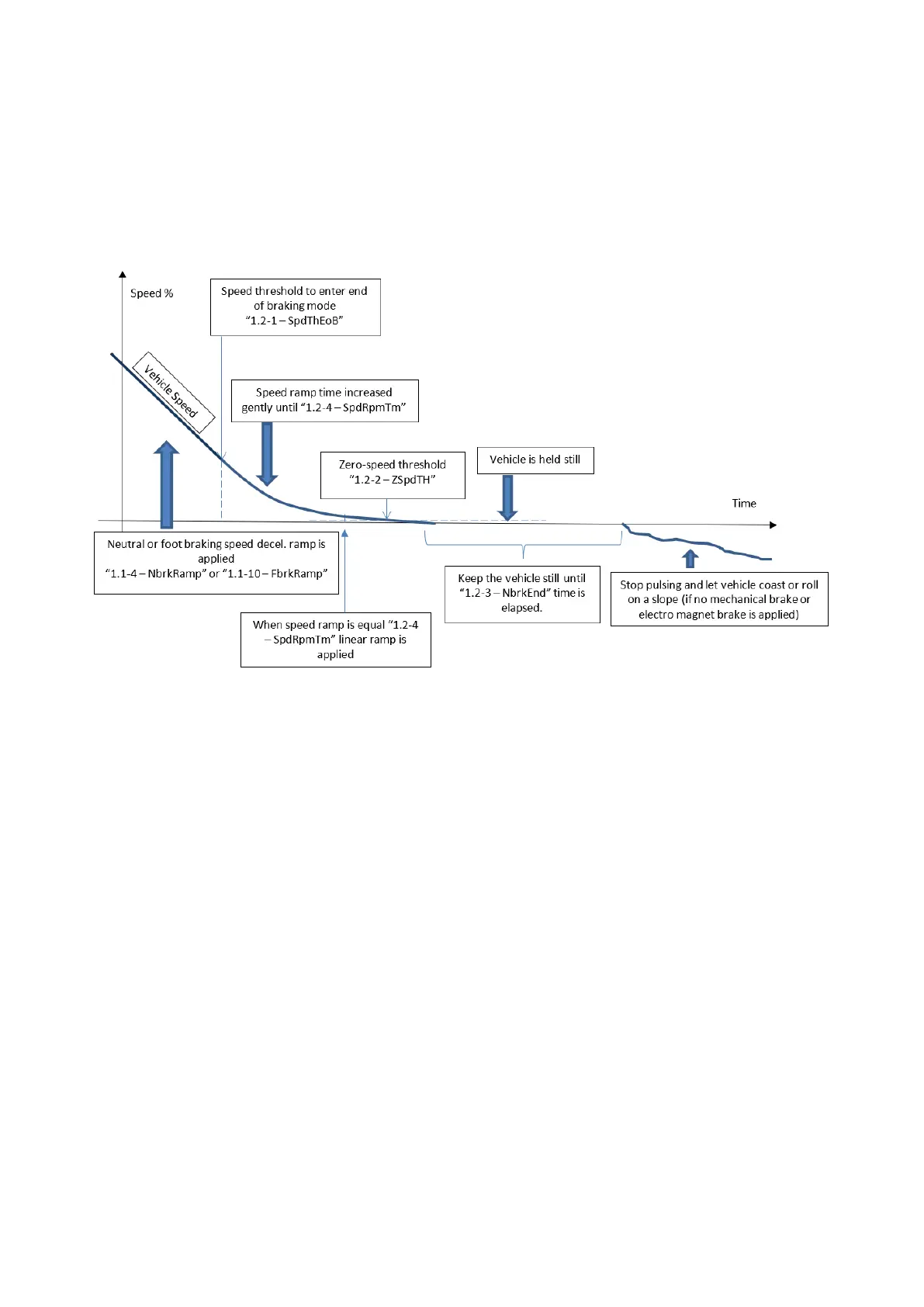
End of braking in Speed control Mode and no hill hold
The following list describes the “end of braking” steps:
1. the speed decreases according to “M1.1-4 Neutral brake ramp time “NBrkRamp”” (if neutral braking is
happening) or “M1.1-10 Foot brake ramp time “FBrkRamp”” (if foot brake is operated);
2. when speed is below setting “M1.2-1 Speed threshold to enter End-of-Braking (EoB) mode ”SpdThEoB””, the
controller increased ramp time until the “M1.2-4 Ramp time from the EoB speed threshold to zero
”SpdRmpTm”” value. In this way a curved ramp is performed;
3. when ramp time is equal to M1-16 Speed threshold Ramp time to zero speed ”SpdRmpTm”” it realize a linear
ramping;
4. when speed is below “M1.2-2 Zero speed threshold ”ZSpdTh””, the vehicle is held still until “M1.2-3 Neutral
brake-end delay “NBrkEnd”” time is elapsed. The vehicle is kept still by means of speed control algorithm;
5. the controller stops giving power to the motor and the vehicle is let coast or roll on slope (if any) unless
mechanical brake or electromechanical brake is applied.
During the end of braking operation, If pedal brake is removed and a direction selected with accelerator pedal demand
(add foot switch in case of ride vehicle) the vehicle will start to move in the selected direction.