Dobot CR A Series User Guide
Issue V1.3 (2023-09-14) User Guide Copyright © Yuejiang Technology Co., Ltd.
11
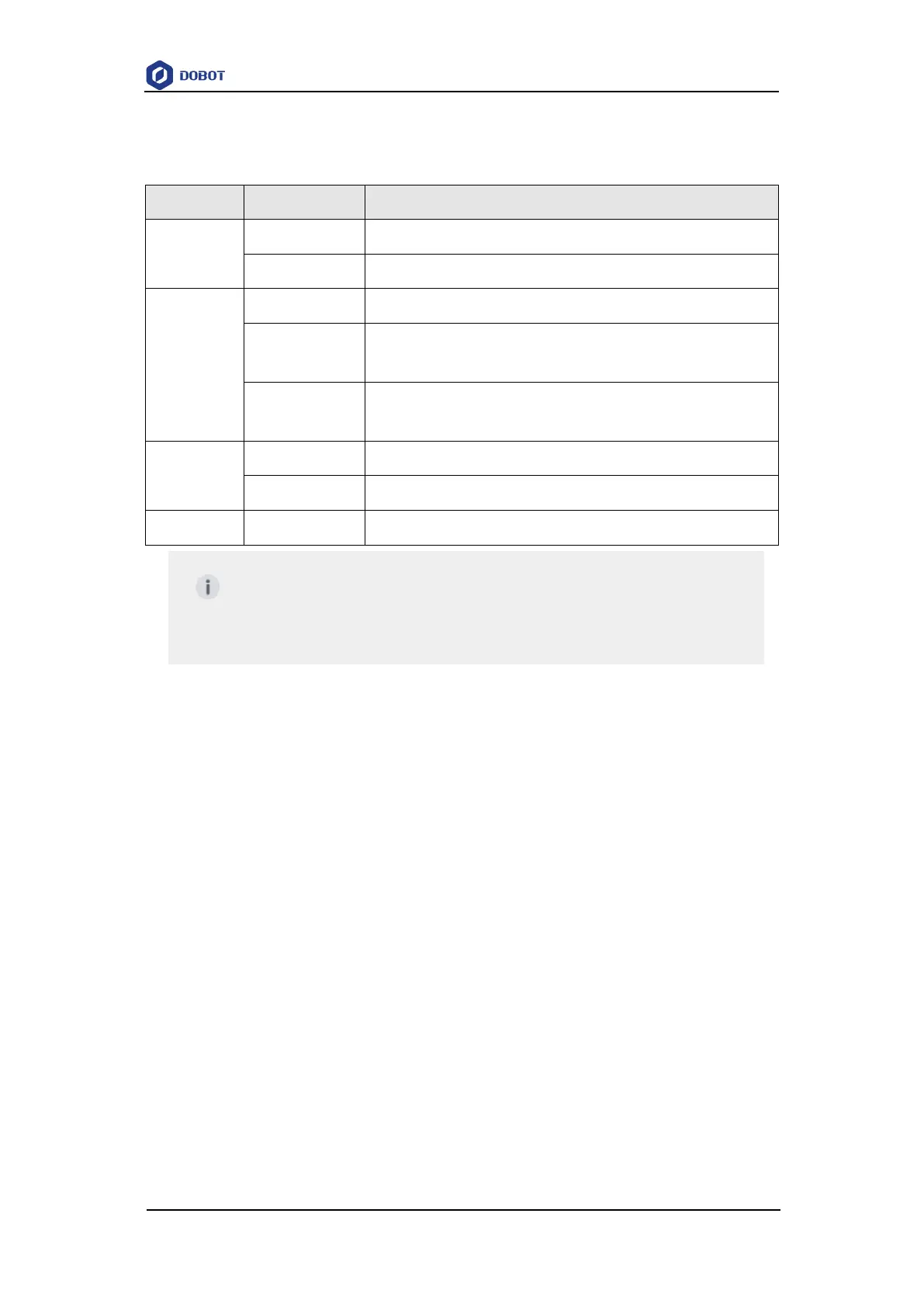
The definition of the indicator lights is shown in Table 3.1.
Table 3.1 Definition of indicator lights
Automatic running status (project debugging/running/pause,
motion commands except TCP jog, trajectory playback)
The functions of the end button are shown below:
Hand-guiding button: When the robot arm is in the enabled status, long press the button
to enter the hand-guiding status. After dragging the robot arm to the teaching point, short-
press the button and the robot arm will exit the hand-guiding status.
End control button: Short-press the button to control the end tool. For specific functions,
you need to configure in “Dobot+” page of the control software.
Enabling button: When the robot arm is powered on and in the disabled status, long press
the button to enter the enabled status. Then short-press the button to disable robot arm.
Trajectory recording button: When the robot arm is in the enabled status, long press the
button to enter the trajectory recording status. After recording the trajectory, short-press
the button, and the robot arm will exit the trajectory recording status.
Trajectory playback button: When the robot arm is in the enabled status, long press the
button to enter the trajectory playback status to play back the last trajectory recorded by
trajectory recording button. Then short-press the button, and the robot arm will exit the
trajectory playback status.