Dobot CR A Series User Guide
Issue V1.3 (2023-09-14) User Guide Copyright © Yuejiang Technology Co., Ltd.
52
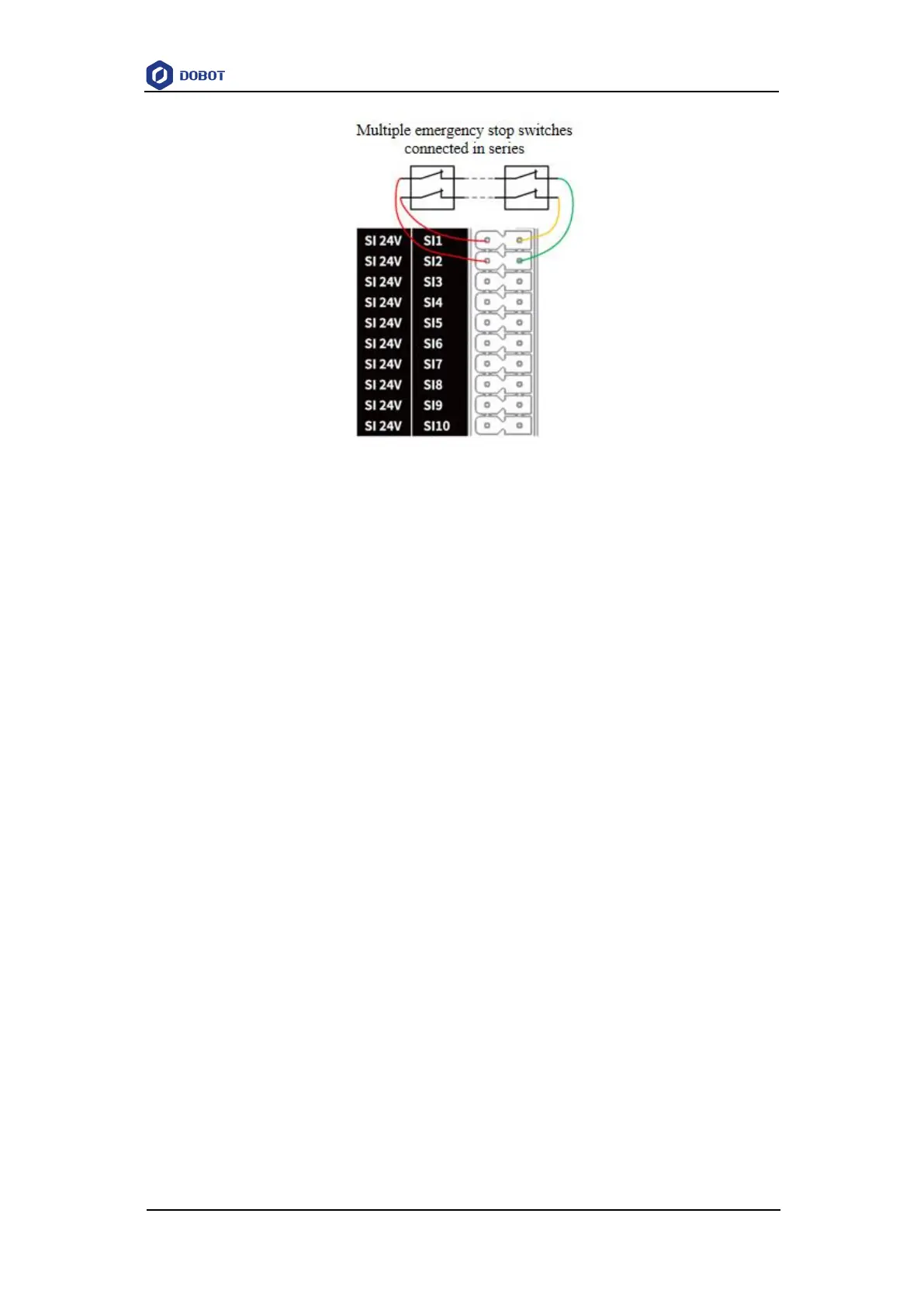
Figure 6.13 SI connected to multiple emergency stop switches
Protective stop input
The protective stop interface is used for connecting external protective devices (such as safety
gate, safety light curtains, etc.).
The protective stop input is the normally closed signal input of high level by default. Low level
triggers the robot to enter the protective stop status (pause status).
⚫ When the protective stop reset interface is configured, the protective stop status can be
released only by restoring the protective stop input signal and triggering the protective
stop reset input simultaneously.
⚫ When the protective stop reset input interface is not configured, the protective stop status
can be released and the operation of the robot can be resumed by restoring the protective
stop input signal.
Protective stop reset input
The protective stop reset input is used to reset the protective stop status.
The protective stop reset input is the normally open signal input of high level by default. The
rising edge of both circuits triggers to reset the protective stop status.
SI3 and SI4 are protective stop inputs, and assume that you have set SI9 and SI10 to protective
stop reset input, the wiring is shown below.