Engineering
M-Max Series Adjustable Frequency Drive
MN04020003E—October 2013 www.eaton.com
23
Motor and Application
Motor Selection
General recommendations for motor selection:
●
Use three-phase powered asynchronous motors with
short-circuit rotors and surface cooling, also called
asynchronous motors or standard motors for the
frequency-controlled drive system (PDS). Other
specifications such as external rotor motors, slip-ring
motors, reluctance motors, synchronous or servo
motors can also be run with a frequency inverter, but
normally require additional planning and discussion
with the motor manufacturer
●
Use only motors with at least heat class F
(311°F [155°C] maximum steady state temperature)
●
Four-pole motors are preferred (synchronous speed:
1500 min
–1
at 50 Hz or 1800 min
–1
at 60 Hz)
●
Take the operating conditions into account for S1 operation
(IEC 60034-1)
●
When operating multiple motors in parallel on one
frequency inverter, the motor output should not be more
than three power classes apart
●
Ensure that the motor is not overdimensioned. If a motor
in speed control mode is underdimensioned, the motor
rating must only be one rating level lower
Connecting Motors in Parallel
The M-Max frequency inverters allow parallel operation of
several motors in V/Hz control mode:
●
V/Hz control: several motors with the same or different
rated operational data. The sum of all motor currents must
be less than the frequency inverter’s rated operational
current
●
V/Hz control: parallel control of several motors. The sum of
the motor currents plus the motors’ inrush currents must
be less than the frequency inverter’s rated operational
current
Parallel operation at different motor speeds can be
implemented only by changing the number of pole pairs and/
or changing the motor’s transmission ratio.
CAUTION
Debounced inputs may not be used in the safety circuit
diagram.
If you are connecting multiple motors on one frequency
inverter, you must design the contactors for the individual
motors according to utilization category AC-3.
Selecting the motor contactor is done according to the rated
operational current of the motor to be connected.
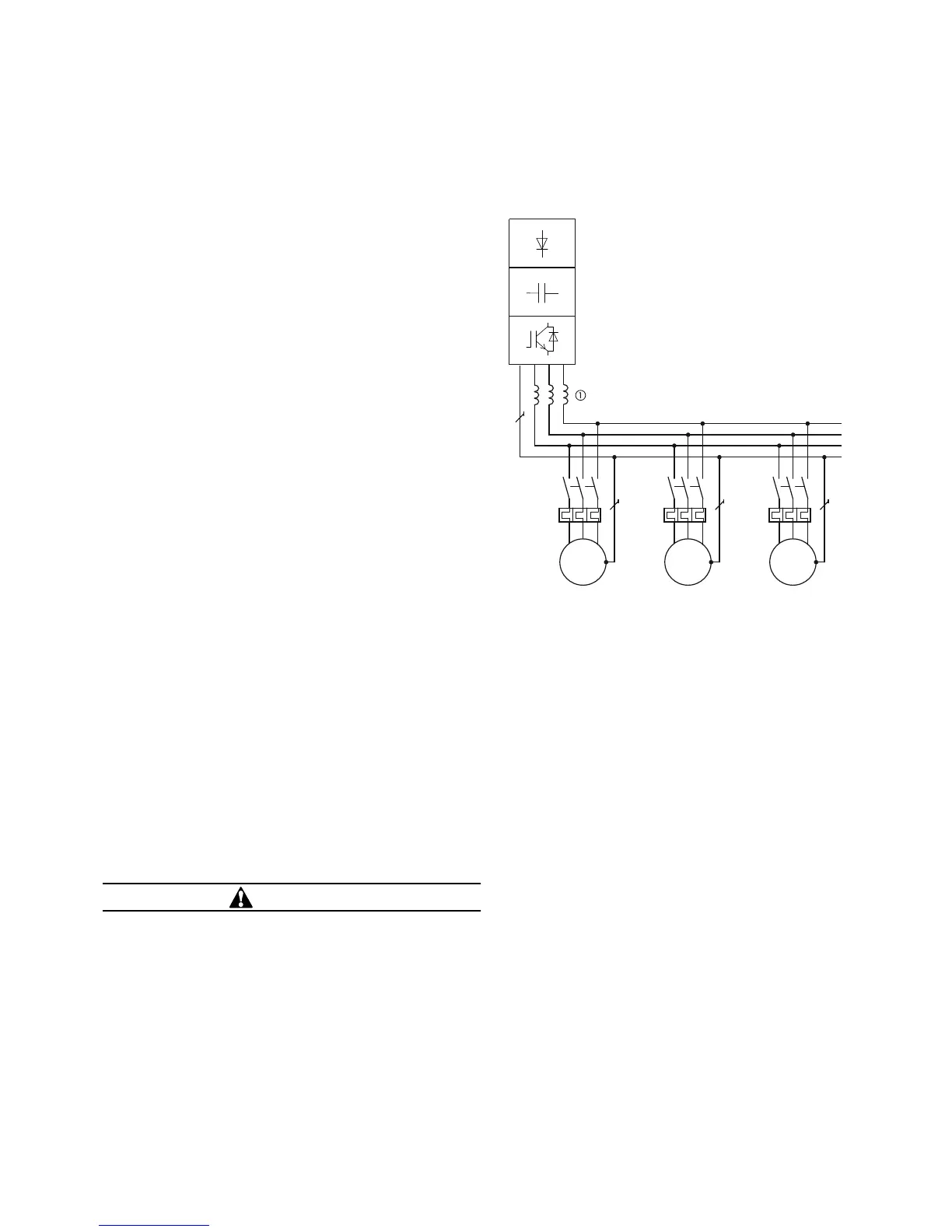
Parallel Connection of Several Motors to
One Frequency Inverter
Connecting motors in parallel reduces the load resistance at
the frequency inverter output. The total stator inductance is
lower and the leakage capacity of the lines greater. As a
result, the current distortion is greater than in a single-motor
circuit. To reduce the current distortion, you should use
motor reactors (see
[1]
in figure above) in the output of the
frequency inverter.
The current consumption of all motors connected in parallel
must not exceed the frequency inverter’s rated output
current I2N.
Electronic motor protection cannot be used when operating
the frequency inverter with several parallel connected
motors. You must, however, protect each motor with
thermistors and/or overload relays.
The use of a motor protective circuit breaker at the frequency
inverter’s output can lead to nuisance tripping.
F1
M1
Q12Q11
F2
M2
Q13
F3
M3
U1 V1 W1 U1 V1 W1 U1 V1 W1
M
3
˜
M
3
˜
M
3
˜

 Loading...
Loading...



