132 EZMotion User/Programming Guide
www.controltechniques.com Revision: A8
indexes are forced to run in a specific direction regardless of the starting point.
TimeBase
This list box selects the Time Base for the index velocity and acceleration/deceleration. Realtime and Synchronized are the available
selections.
Distance/Position
The Distance/Position parameter is a signed value that specifies the distance the index will travel (incremental index) or the absolute
position the index will move to (absolute index). In the case of an incremental index, this parameter also determines the direction the
index will travel. If an index type of Registration is selected, then this is a limit distance, or the maximum distance the index will travel
if a registration sensor is not seen.
Velocity
This sets the target velocity for the index profile. The velocity parameter is unsigned and must be greater than zero. Direction of the
index is not determined by the velocity, but by the Distance/Position parameter.
Acceleration
Average Acceleration rate used during the index. Units are specified on the User Units view.
Deceleration
The Deceleration parameter specifies the deceleration value to be used during the index in user units.
Timed Indexes
A Timed Index allows the user to specify the amount of time in which to perform an index rather than specifying the Velocity,
Acceleration, and Deceleration. The processor in the SM-EZ Motion module will automatically calculate the necessary velocity,
accel, and decel in order to achieve the programmed distance in the specified time.
NOTE
A user program cannot compound into a Timed Index, or compound out of a Timed Index.
All index types can be specified as a Timed Index, except for Registration type indexes. This is because a registration index does not
have a specified distance or absolute position. During a registration type index, the registration sensor could activate at any time,
and therefore it is impossible to calculate the necessary velocity, accel, and decel. If Registration type is selected, then the Time
check box will become disabled.
Based on the Distance entered (or Position for Absolute indexes) and the Time value specified, the calculations could result in
extremely high Velocities, Accels, and Decels. To avoid damage to mechanical parts, or potentially dangerous situations, the user is
allowed to enter the Maximum Velocity, Acceleration, and Deceleration used for the calculations. The results of the firmware
calculations will never exceed the maximum values specified.
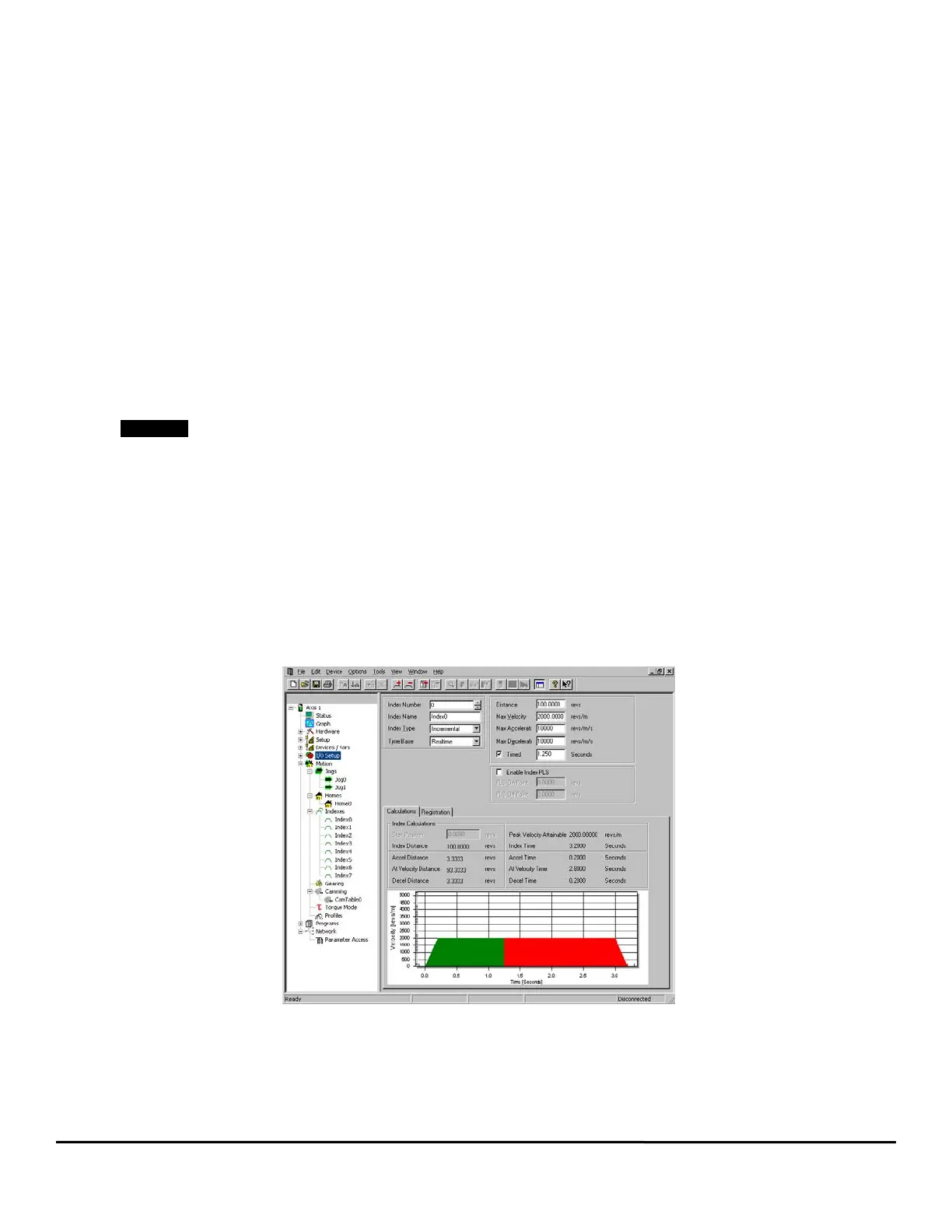
Figure 141 shows a screen capture in which the Timed check box has been enabled. Notice how the parameters that normally say
Velocity, Acceleration, and Deceleration have changed to say Max. Velocity, Max. Acceleration, and Max. Deceleration. When the
Time check box is selected, these parameters automatically become maximums for use in the calculations.
Figure 141: Index View with Timed Index Selected
If the values for Max.Velocity, Max.Acceleration, and Max.Deceleration are such that the distance cannot be covered in the specified
time, the Index.ProfileLimited flag will activate when the index is initiated, indicating the index cannot be performed as desired. The
internal calculation are performed only when the index is initiated, and therefore is the only time the flag will activate. The
Index.ProfileLimited flag will remain active until cleared using the Index.ResetProfileLimited assignment or program instruction. In
 Loading...
Loading...






