6 Service functions and diagnostic messages
60 Festo – GDCP-CMMP-M0-HW-EN – 1511c – English
6.1.6 Monitoring of the motor
The motor controller CMMP-AS-...-M0 has the following protective functions for monitoring the motor
and the connected shaft encoder:
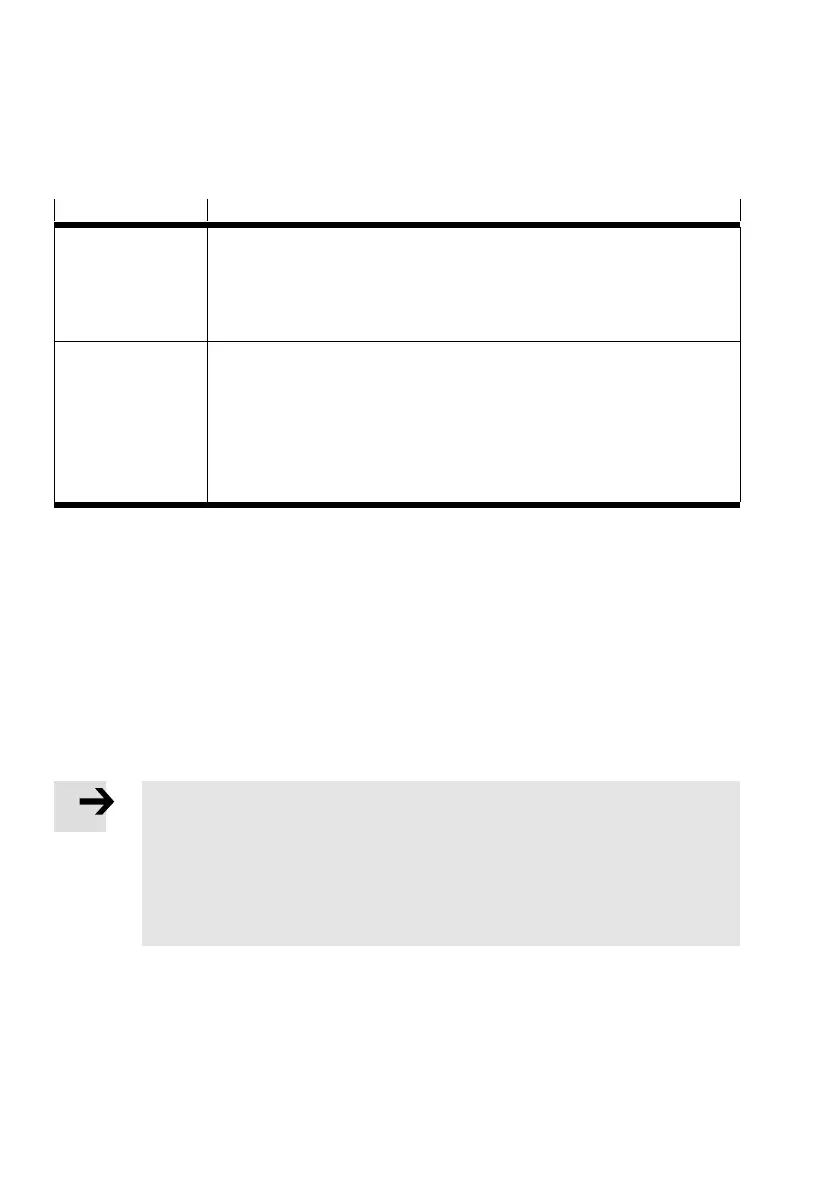
Protective function Description
Monitoring the shaft
encoder
An error of the shaft encoder results in switching off of the power output
stage. For the resolver, for example, the tracking signal is monitored. For in
cremental encoders, the commutation signals are checked. Generally true for
intelligent encoders is that their various error messages are evaluated and
reported to the CMMP-AS-...-M0 as common error E 08-8.
Measurement and
monitoring of the
motor temperature
The motor controller CMMP-AS-...-M0 has a digital and an analogue input for
recording and monitoring the motor temperature. They are selectable as tem
perature sensors.
– [X6]: Digital input for PTCs, N/C contacts and N/O contacts.
– [X2A] and
[X2B]:
N/C contact and KTY series analogue sensors. Other
sensors (NTC, PTC) require a corresponding software
adaptation as needed.
Tab. 6.1 Protective functions of the motor
6.1.7 I
2
t monitoring
The motor controller CMMP-AS-...-M0 has I
2
t monitoring to limit the average power loss in the power
end stage and in the motor. Since the power loss that occurs in the power electronics and the motor
can, in the worst case, grow at a rate equal to the square of the flowing current, the squared current
value is taken as a measure for the power loss.
6.1.8 Power monitoring for the brake chopper
The braking resistors are monitored on the firmware side through the function I
2
t brake chopper. When
the power monitoring “I²t brake chopper” of 100% is reached, the output of the internal braking resist
or is limited to the rated output.
Note
As a result of this switch-back, the error “E 07-0” “Overvoltage in the intermediate circuit” is
generated. If the braking process is not completed, the residual energy is fed back to the
motor controller and results in an uncontrolled running out of the drive if no automatic lock
ing mechanical system, clamping units or weight compensation is used.
This can result in damage to the machine. Connection of an appropriate clamping unit to
prevent an uncontrolled running out of the drive at the motor controller is recommended.
In addition, the brake chopper is protected by means of overcurrent detection. If a short circuit is detec
ted via the braking resistor, the brake chopper controller is switched off.
 Loading...
Loading...









